
Fig. 5: Application in autonomous robotic transformer for multigait locomotion.
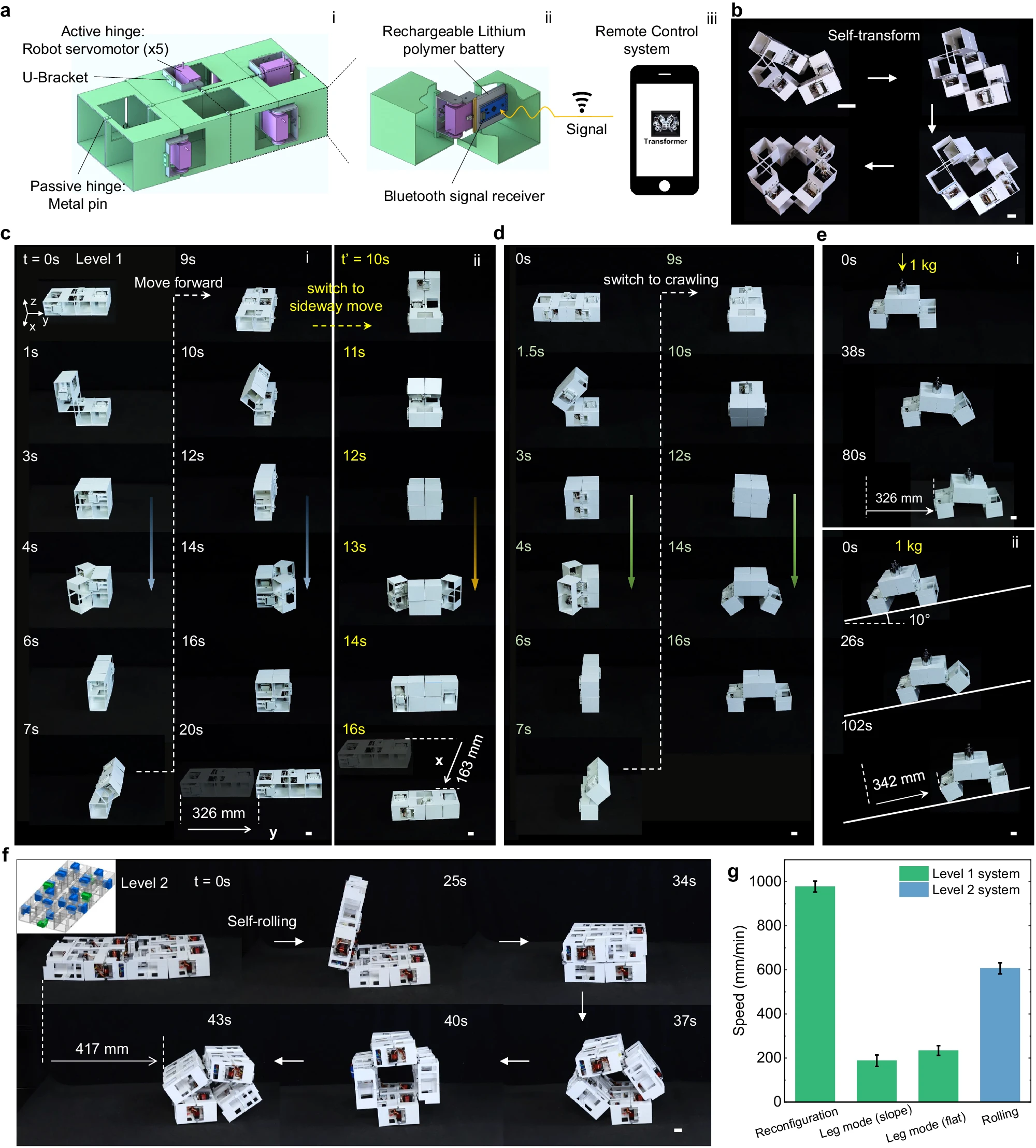
a Schematics of untethered actuation design details for the level 1 eight-cube-based structure: 5 electrically powered servomotors for active hinge rotation (i), onboard power system and Bluetooth wireless receiver to conduct reconfiguration order (ii) from customized remote control software (iii). b Demonstrated untethered shape morphing in the level-1 structure through looped mechanisms. c–e Shape transformation in level-1 structure for multigait locomotion. Scale bar: 3 cm. c Forward (i) and sideway locomotion (ii). d Locomotion gait switch from reconfiguration to legged walking; e Legged walking with carried payload on flat surface (i) and 10°-sloped surface (ii). f Demonstration of the specific positions of 22 active servomotors and the rolling locomotion of level-2 structure. Scale bar: 3 cm. g Locomotion speeds of both level-1 and level-2 structures in (c–f).
