
Abstract
A switching active disturbance rejection control (SADRC) strategy was proposed to solve the composite disturbance challenge arising from gap, LuGre friction, hydraulic spring force, and external load disturbance in the double closed-loop digital hydraulic cylinder position control system. Firstly, leveraging the established mathematical model of the double closed-loop digital hydraulic cylinder, the high-order state equation was derived. Subsequently, the high-order double closed-loop digital hydraulic cylinder control system was transformed into a second-order integral series control system using ADRC strategy. Given the pronounced nonlinear characteristics of double closed-loop digital hydraulic cylinders, combined with the characteristics of switching control, a SADRC strategy was proposed, and the stability of the closed-loop system was proved based on Lyapunov theory and switching rules. Finally, the effectiveness of the proposed control method was verified through simulation and experiment. Results indicate that the system's response speed employing the SADRC strategy outperforms the PID control strategy by 32.56%, with a 2.0% reduction in error. The average error in the response speed of the digital hydraulic cylinder and the MATLAB simulation value of the tracking error are 9.0% and 1.50% respectively. Notably, the simulation and experimental results exhibit a consistent overall trend, affirming the feasibility and effectiveness of the control strategy.
Similar content being viewed by others
Introduction
The digital hydraulic cylinder holds significant promise in contemporary engineering applications due to its straightforward design, robust resistance to oil contamination, and high precision positioning capabilities1. For instance, implementing an automatic height adjustment system in a coal mining machine, propelled by a digital hydraulic cylinder, can enhance its precision control. However, the control system of digital hydraulic cylinders faces challenges stemming from nonlinear elements like gap and friction, as well as unpredictable disturbances such as time-varying load disturbances2,3. This renders the control system susceptible to external disturbances and nonlinear characteristics, making it arduous to meet ideal control requirements in practical settings. Furthermore, various unmeasurable states exist within the digital hydraulic cylinder control system, including the acceleration signal of the digital hydraulic cylinder, speed and acceleration signals of the servo valve spool, and angular speed and angular acceleration signals of the ball screw. Leveraging the state observer method becomes essential to estimate these unmeasurable state quantities, enabling system control based on output feedback4,5.
Qing et al.6 investigated the impact of different valve port configurations on the performance of digital hydraulic cylinders. It was observed that the rectangular valve port exhibits the highest flow gain, with the equivalent flow area decreasing in the order of rectangular, U-shaped, and triangular valve ports under identical spool displacement. Furthermore, the rectangular valve port demonstrated the shortest adjustment time, minimal overshoot, and superior speed characteristics. In reference7, the stability of digital hydraulic cylinders was analyzed using the descriptive function method. It was concluded that the error size is directly proportional to the size of the gap. By reducing the gap, lead of the ball screw, and increasing the lead of the feedback nut, the static error of the system can be reduced. Based on the structure and closed-loop control principle of digital hydraulic cylinder, the overall mathematical model of digital hydraulic cylinder was established in reference8. It was discovered that fluctuations in oil supply pressure can induce system jitter, and reducing the stepper motor frequency can enhance the positioning accuracy of the cylinder. Kalaiarassan et al.9 focused on end-point tracking of a single-link robot arm controlled by a digital hydraulic system. The control signal for trajectory tracking was computed by considering both cylinder pressure and speed, leading to improved performance in low-speed tracking with reduced computational complexity. This approach achieved good controllability in low-speed tracking, with simulation analysis demonstrating a tracking error of nearly 2%. Pan et al.10 constructed the nonlinear model of digital hydraulic cylinder and controller for the first time, followed by the transformation of the nonlinear problem into a linear matrix inequality solution problem. Subsequently, an anti-saturation compensator was designed. Simulation results showed that the designed controller and compensator ensured system robustness and good dynamic performance. Wang et al.11 introduced a control strategy that combined backstepping control and nonlinear disturbance observer to address various types of disturbances in digital hydraulic cylinders. This control strategy effectively reduced position tracking error, phase lag, steady-state limit cycles, and low-speed crawling phenomena caused by parameter uncertainty and uncertain non-linearity in the system, while improving the response speed of the system and enhancing the system more robust. In reference12, the sensitivity and feedback accuracy of the feedback system were controlled by adjusting the diameter of the friction wheel, the positive pressure on the piston rod and the modulus of the bevel gear. By employing friction transmission, mechanical impact from the rigid connector was reduced, leading to reduced mechanical wear of components and oil pollution, thereby enhancing the reliability of the system. A cross-coupling control strategy13 was proposed based on the inability of digital hydraulic cylinders to adjust in real-time. This control algorithm effectively ensured that the digital hydraulic cylinder tracks the input signals, improving system robustness and synchronization performance, albeit with some remaining static errors. In reference14, a third-order ADRC based servo valve-controlled hydraulic motor was proposed to address the unstable and nonlinear characteristics of the system. By employing advance prediction to mitigate phase lag introduced by the third-order ADRC controller, the control performance of the ADRC controller was significantly enhanced. Simulation experiments demonstrated that the designed ADRC controller outperformed the traditional PID controller in terms of tracking performance and system robustness. Wang et al.15 introduced a series controller consisting of ADRC and dead zone inverse compensation to tackle dead zone, parameter uncertainty, and external unknown disturbances in the proportional valve of an electro-hydraulic position servo control system. Simulation and experimental results showcased that the proposed series controller effectively compensated for the dead zone of the proportional valve, thereby improving the system's dynamic performance and position tracking accuracy.
The above references studied the stability and accuracy of digital hydraulic cylinders through numerical simulation and experimental verification, providing both theoretical insights and empirical evidence. However, the single control strategy cannot effectively improve the system performance, and some control algorithms may pose challenges in design and implementation. In reference3, the performance of the digital hydraulic cylinder position control system can be effectively improved by using a composite control strategy. However, there are many controller parameters that need to be adjusted, which are difficult to find and consume a lot of time and effort.
Based on the above analyses, this paper focuses on the existing mathematical model of double closed-loop digital hydraulic cylinders and obtains high-order state equations. To facilitate controller design and implementation, firstly, the high-order double closed-loop digital hydraulic cylinder control system is initially transformed into a second-order integral series control system using ADRC. The ESO is employed to estimate the system states and uncertain disturbances online. Concurrently, leveraging the characteristics of switching control, this paper introduces the SADRC strategy. Subsequently, the system is modeled and simulated using MATLAB simulation software. The performance of the digital hydraulic cylinder position system under the SADRC strategy is evaluated through simulation, and a dedicated test bench is constructed to experimentally validate the effectiveness of SADRC. The control parameters that need to be adjusted for this control strategy are significantly fewer than those outlined in reference3.
State space model of a double closed-loop digital hydraulic cylinder
The double closed-loop digital hydraulic cylinder integrates both the internal indirect feedback digital hydraulic cylinder and the indirect digital control hydraulic cylinder. To streamline the structure of the digital hydraulic cylinder, this paper adopts the internal indirect feedback structure , substituting the traditional stepper motor with a higher precision servo motor. Additionally, the encoder and magnetic coupling mechanism of the digital hydraulic cylinder structure are eliminated, and position feedback control is incorporated. This transformation results in a novel type of double closed-loop digital hydraulic cylinder, illustrated in Fig. 1.

Working principle diagram of digital hydraulic cylinder. 1. Servo motor; 2. coupler; 3. valve spool sliding pair; 4. valve body; 5. spool; 6. spool thread pair; 7. fixed sleeve; 8. thrust bearing; 9. piston thread pair; 10. ball screw; 11. piston rod; 12. cylinder body.
The double closed-loop digital hydraulic cylinder consists of several key components: a servo motor, a coupling, a four-way valve spool, an internal indirect feedback mechanism, and a traditional form of hydraulic cylinder. The internal indirect feedback mechanism comprises a ball screw and a valve spool feedback mechanism. The thrust bearing presses the ball screw tightly on the cylinder head. The screw has only one degree of freedom of rotation and both the piston and the nut are fixed. A piston thread pair is formed between the screw and the piston, and the other end of the screw is connected to the right end of the valve spool thread, forming the valve spool thread pair. The right end of the servo motor is connected to the left end of the valve spool by a coupling, and the valve spool has only one degree of axial movement freedom relative to the output shaft of the servo motor, thereby forming a sliding pair of the valve spool.
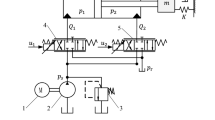
The structural diagram of the double closed-loop digital hydraulic cylinder position control system is shown in Fig. 2.

Double closed-loop digital hydraulic cylinder position control system structure diagram
Jiang et al.3 discussed the working principle of digital hydraulic cylinder in detail, and established a more comprehensive mathematical model based on the comprehensive analysis of the system composition. This model comprehensively consider the dynamics of the valve spool and feedback mechanism, while covering non-linear factors such as transmission gap, radial leakage of the spool, as well as LuGre friction and non-linear hydraulic springs, which can more realistically reflect the actual situation of the system. This paper will not go into detail here and will directly provide an integrated non-linear state space model.
The system control input is \(u_{q}\), the output piston rod displacement is \(y = x_{1} = x_{p}\), the system state variable is \(x\), the state equation is:
In the formula (2): where, \(w_{1} = {{ - F_{L} } \mathord{\left/ {\vphantom {{ - F_{L} } {M_{t} }}} \right. \kern-0pt} {M_{t} }}\), \(w_{2} = {{\left[ { - C_{0} x_{3} - C_{1} \left( {x_{3} - x_{4} } \right)} \right]\beta_{e} } \mathord{\left/ {\vphantom {{\left[ { - C_{0} x_{3} - C_{1} \left( {x_{3} - x_{4} } \right)} \right]\beta_{e} } {\left( {V_{01} + A_{1} x_{1} } \right)}}} \right. \kern-0pt} {\left( {V_{01} + A_{1} x_{1} } \right)}}\),
\(w_{3} = {{\left[ { - C_{0} x_{4} + C_{1} \left( {x_{3} - x_{4} } \right)} \right]\beta_{e} } \mathord{\left/ {\vphantom {{\left[ { - C_{0} x_{4} + C_{1} \left( {x_{3} - x_{4} } \right)} \right]\beta_{e} } {\left( {V_{02} - A_{2} x_{1} } \right)}}} \right. \kern-0pt} {\left( {V_{02} - A_{2} x_{1} } \right)}}\).
Considering the hydraulic cylinder load force and leakage as disturbances in the system, namely:
Therefore the disturbances, \(w_{1}\), \(w_{2}\) and \(w_{3}\) are bounded.
Then, the system state space expression is:
In the formula (4):
ADRC takes PID control as its core, retaining the advantages of classical control theory and abandoning the dependence of modern control theory on accurate models. It pays more attention to the control rather than the mathematical model of the controlled object. The core of ADRC is to sum up the internal/external disturbances and uncertainties of the system as “unknown disturbances”, then use the extended state observer (ESO) to estimate them, and finally use the controller to compensate for them16,17. Therefore, ADRC has a better control effect and is more suitable for controlling nonlinear systems. Since the double closed-loop digital hydraulic cylinder is a complex system, combined with the characteristics of switching control and ADRC, a SADRC strategy is proposed. The system structure diagram is shown in Fig. 3.

SADRC system structure diagram.
The ADRC consists of three main parts: a tracking differentiator (TD), an extended state observer (ESO), and a non-linear state error feedback (NLSEF) controller.
Tracking differentiator (TD)
The essence of the TD is to filter the input signal and obtain the differentiation of the input signal, which is a signal processing method. Especially when there is a sudden change in the input signal, TD can provide a smooth input signal to the controller. At the same time, the filtering function of TD can reduce the sudden change signal and prevent the system from overshooting, effectively solving the contradiction between “speed” and “overshoot” of the system, and improving the stability of the system18.
Based on the ADRC theory, the digital hydraulic cylinder in this paper is equivalent to a second-order system. Assuming a second-order TD is selected, two TDs must be connected in series. If the input command of the system is a sine signal (multi-order differentiable), there is no problem. However, if the system input is a step signal, the derivative of the TD will appear infinite, which is theoretically problematic. Therefore, the TD and ESO in this paper are both third-order. LTD is relatively independent in LADRC, serving as the transition signal \(v_{0}\) of the target point and the differential signal \(v_{0}^{(i)}\) of any order of the transition signal of the target point, i.e. \(v_{1} \to v_{0}\), \(v_{i + 1} \to v_{0}^{(i)}\) \(\left( {i = 1,2, \cdots n} \right)\). Combining references19 and20, the second-order LTD given in reference20 is extended to the higher-order SPGH-LTD form, and the specific form of the higher-order LTD is:
In the formula (8): R is the adjustment gain that determines the tracking speed, and the coefficient \(a_{i} \left( {i = 1,2, \ldots ,n + 1} \right)\) needs to satisfy formula (9).
In the formula (9): A is Hurwitz matrix, \(v = \left[ {v_{1} ,v_{2} , \ldots ,v_{n} } \right]^{T}\).
Extended state observer (ESO)
The function of an ESO is to extend the “disturbance” of the system into a new state variable, with the aim of facilitating the estimation of disturbances. The ESO is the core part of ADRC. It abandons traditional measurement of disturbance effects or precise mathematical models of disturbances, and directly refers to these factors as “total disturbances”. Through real-time online estimation of the system state and “total disturbances”, the original system is transformed into an integral series system by “disturbance compensation”21,22. In Fig. 3, \(z_{1} \sim z_{n}\) represents the observed object state and \(z_{n + 1}\) represents the expansion state.
This paper equates the high-order nonlinear system of digital hydraulic cylinders as a complex nonlinear system with disturbances, as demonstrated in the formula (10).
In the Eq. (10): \(f\left( {x_{1} ,x_{2} , \ldots ,x_{14} ,t} \right)\) is an unknown function, representing the dynamics of the controlled object, including internal disturbances of the system, and \(w(t)\) is an unknown external disturbance. Expanding the total disturbance to a new state variable \(x_{3}\), denoted as \(x_{3} = f(x_{1} ,x_{2} , \ldots ,x_{14} ,t) + w(t)\). Let \(x_{3} = a(t)\), \(\dot{x}_{3} = a_{0} (t)\), b is the control gains, then \(b \approx b_{0}\). The system (10) can be expanded to formula (11).
In this system, the sum of internal and external disturbances is represented by \(a(t)\), and the particular form of the \(a_{0} (t)\) expression is no longer important. The system described above was transformed into a linear system, and an observer was then constructed. If the state variable is set to \(z\), then there is:
In the formula(12): z1, z2 represents the estimated signal of the state variable x1, x2, z3 represents the estimated signal of the extended state \(x_{3}\), and \(e_{1} = z_{1} - x_{1}\) represents the observation error, \(fal\left( {e_{1} ,\alpha ,\delta } \right)\) is a nonlinear function, and its expression is:
In the formula(13): the form of the nonlinear function is determined by the parameter \(\alpha\), while the size of the linear interval is represented by \(\delta\). Subtracts formula (11) from formula (12) results in formula (14).
When the system reaches a steady state, all the right-hand sides of the equation converge towards zero, namely:
Then, formula (15) can be expressed as:
Make \(\beta_{02} fal\left( {e_{1} ,\alpha_{1} ,\delta } \right) = \lambda_{02} (e_{1} )e_{1}\), \(\beta_{03} fal\left( {e_{1} ,\alpha_{2} ,\delta } \right) = \, \lambda_{03} (e_{1} )e_{1}\). The error in a steady state of the system may be expressed as.
From formula (17) above, it can be observed that if \(\lambda_{03} (e_{1} )\) is sufficiently large, these estimation errors will converge to zero.
Nonlinear state error feedback control law (NLSEF)
The PID controller deals with the error signal of input and output by linear operation method. In the initial state, this error is directly selected. Because the initial control quantity is too large, the system will cause an overshoot phenomenon. Therefore, the PID controller cannot solve the contradiction between the response speed and the overshoot in the system. After a lot of research, Han Jingqing found that the nonlinear function can deal with the problem of response speed and overshoot23,24. The application of the nonlinear module in ADRC will achieve excellent results. Using the nonlinear feedback control strategy, the system can select a smaller gain when the error is large or select a larger gain when the system error is small, optimize the system processing information speed, and improve the system control performance25,26. Figure 4 shows the structure diagram of the NLSEF for n-order system.

The structure diagram of nonlinear error feedback control law.
In ADRC, to eliminate the error as much as possible, the constructed linear state error feedback control law usually adopts the following nonlinear combination, as shown in the formula (18).
The function fal in formula (18) is equivalent to that in formula (13), Where , \(\alpha_{1}\)\(\alpha_{2}\), \(\delta\), \(\beta_{1}\) and \(\beta_{2}\) represent nonlinear parameters, \(0 < \alpha_{1} < 1 < \alpha_{2}\). denotes the system state error, and the control variable \(u_{0}\) is fitted through a nonlinear function to reduce the system error and avoid high-frequency oscillations.
When the estimated value of the total disturbance \(x_{3}\) of the system is obtained, and \(b_{0}\) in the formula (11) is known, the control variable may be determined as follows:
or
Through the above form transformation, the original nonlinear control system is equivalent to an integral series linear control system, which is called dynamic linear compensation. Therefore, by combining the ESO and the compensation control strategy, a unified method can be used to deal with various control systems such as linear, nonlinear, parameter determination and parameter uncertainty.
Stability analysis of SADRC
In this paper, a revised nonlinear state observer (NLESO) is proposed for the system (10). The NLESO is described as follows:
The solution of the NLESO, which is explored in this chapter, relies on adjusting the parameter \(\varepsilon\). Its observer form is :
In this case, \(g_{i} ()\) in the Eq. (21) represents \(g_{i1} (y_{1} ) = - k_{i1} y_{1} - \varphi (y_{1} )\), \(g_{i2} (y_{1} ) = - k_{i2} y_{1}\) and \(g_{i3} (y_{1} ) = - k_{i3} y_{1}\), respectively, wherein \(y_{1} = y(t) - \hat{x}_{1} (t)\). Then, the formula (21) can be modified to formula (21).
The non-linear function \(\varphi\) in formula (22) is:
The function \(\varphi (r)\) in the NLESO is a nonlinear, and the constant \(k_{ij}\) is the matrix \(E_{i}\) given by Hurwitz as follows:
The characteristic equation of formula (24) is:
The Routh criterion can be obtained since it is equivalent to the Hurwitz stability criterion. The convergence condition of the ESO is as follows:
Lyapunov function V: \({\mathbb{R}}^{3} \to {\mathbb{R}}\) can be defined as:
Let the positive definite matrix P , Which is the solution of the Lyapunov matrix equation \(PE + E^{T} P = - I\) for the positive definite matrix, where I represents the (n + 1) dimensional identity matrix and defines the function V, W: \({\mathbb{R}}^{3} \to {\mathbb{R}}\), \(V(\eta ) = \left\langle {P\eta ,\eta } \right\rangle { = }\eta^{T} P\eta\), \(W(\eta ) = \left\langle {\eta ,\eta } \right\rangle = \eta^{T} \eta\), \(\forall \eta \in {\mathbb{R}}^{n + 1}\). Then:
and:
where \(\lambda_{\min } (P)\) and \(\lambda_{\max } (P)\) represent the maximum and minimum eigenvalues of matrix P, respectively.
For the switching system in this paper, set the matrices \(E_{i}\) to be \(E_{1} = \left( {\begin{array}{*{20}c} { - 6} & 1 & 0 \\ { - 11} & 0 & 1 \\ { - 6} & 0 & 0 \\ \end{array} } \right)\) and \(E_{2} = \left( {\begin{array}{*{20}c} { - 3} & 1 & 0 \\ { - 3} & 0 & 1 \\ { - 1} & 0 & 0 \\ \end{array} } \right)\), respectively. Among them, the eigenvalues of \(\left\{ { - 1, - 2, - 3} \right\}\) are \(E_{1}\) and \(\left\{ { - 1, - 1, - 1} \right\}\) are \(E_{2}\), respectively, so both \(E_{1}\) and \(E_{2}\) satisfy the Hurwitz form of the matrix.
From formula \(PE + E^{T} P = - I\), it can be determined that matrices \(P_{1}\) and \(P_{2}\) are respectively \(P_{1} = \left[ {\begin{array}{*{20}c} {1.7} & { - 0.5} & { - 0.7} \\ { - 0.5} & {0.7} & { - 0.5} \\ { - 0.7} & { - 0.5} & {{{23} \mathord{\left/ {\vphantom {{23} {15}}} \right. \kern-0pt} {15}}} \\ \end{array} } \right]\) and \(P_{2} = \left[ {\begin{array}{*{20}c} 1 & { - 0.5} & { - 1} \\ { - 0.5} & { \, 1} & { - 0.5} \\ { - 1} & { \, - 0.5} & 4 \\ \end{array} } \right]\). \(g_{i} ()\) are respectively \(g_{11} (y_{1} ) = - 6y_{1} - \varphi (y_{1} )\), \(g_{12} (y_{1} ) = - 11y_{1}\), \(g_{13} (y_{1} ) = - 6y_{1}\); \(g_{21} (y_{1} ) = - 3y_{1} - \varphi (y_{1} )\), \(g_{22} (y_{1} ) = - 3y_{1}\), \(g_{23} (y_{1} ) = - y_{1}\).
Directly calculated:
From the above calculation, it can be observed that the two variables \(V_{i}\) in the switching subsystem satisfy the Lyapunov function. The switching rule of the system is set as follows:
The smaller \(V_{i}\) is selected by the switching rule, which can ensure that the energy of the system is reduced after each switching, and then the ESO is used to find the corresponding observation state. Combined with formulas (16), (18) and (20), the switching controller is finally obtained:
Therefore, based on the switching rule (32) of the system, it can be seen that the SADRC strategy designed in this chapter can ensure the stability of the closed-loop system.
Results
To verify the superiority of the control strategy designed in this paper, the simulation model of the digital hydraulic cylinder position control system is built in the MATLAB/Simulink simulation platform, and the SADRC strategy is compared with the traditional PID control strategy. The digital hydraulic cylinder position system based on SADRC is shown in Fig. 5. In the absence of external interference and square wave disturbance, the system input signals adopt step signal, sine signal, slope signal and custom signal respectively. The influence of two control strategies on the performance of a digital hydraulic cylinder is studied by simulation.

Digital hydraulic cylinder position control system based on SADRC.
The main parameters of the digital hydraulic cylinder simulation model are shown in Table 1.
Research on the performance of digital hydraulic cylinder position control system without external disturbance
Step response
In the absence of external disturbance, the position command of the step signal is set at 1 s and the amplitude changes from 0 to 60 mm. The simulation time is 10 s. Determine the PID control parameters in this paper through debugging as follows:\(k_{p} = 5000\), \(k_{i} = 200\), \(k_{d} = 100\), filter coefficient is \(N = 1\). The parameters of the SADRC are shown in Table 2.
Figure 6a shows the piston displacement curve, and Fig. 6b shows the piston error curve. It can be seen from Fig. 6a,b that the digital hydraulic cylinder control system is an over-damped system, and there is basically no overshoot. When the adjustment time of the system under the PID control strategy is about 4.3 s, the system is in a stable state, and the static error of the system is 1 mm. When the adjustment time of the system under the SADRC strategy is about 2.9 s, the response speed is increased by 32.56%. At this time, the system is in a stable state, the static error of the system is basically zero, and the position error is reduced by 1.67%. Therefore, the system has higher robustness and faster convergence speed under the SADRC strategy.

Piston displacement and piston error curve.
Figure 7 is the output voltage curve of the controller. It can be clearly seen from the diagram that the output voltage convergence effect of the SADRC strategy system is significantly faster than the output voltage under the PID control strategy, which further verifies the correctness of Fig. 6.

Controller output voltage curve.
Figure 8 shows the switching signal of the SADRC system. The switching signal produces multiple switching at 2.9 s. By switching under two types of non-linear ESO, the system reaches a stable state at around 2.9 s, ensuring the stability of the entire closed-loop system.

Switching signal curve.
Sine response
In the absence of external disturbance, for the continuously changing sine position command following the signal, set its frequency to 0.8 rad/s, amplitude to 30 mm, and simulation time to 10 s. The PID control parameters are: \(k_{p} = 10000\), \(k_{i} = 600\), and \(k_{d} = 1000\), filter coefficient is \(N = 1000\). The parameters of the SADRC are consistent with Table 2.
Figure 9a shows the piston displacement curve, and Fig. 9b shows the piston error curve. From Fig. 9a,b, it can be seen that the system can track command signal well under both types of control. The maximum static error of the system under PID control is 1.8 mm, while the maximum static error of the system under SADRC is 1.4 mm, and the position error is reduced by 0.67%. Therefore, the system can reduce the tracking error and improve the accuracy of the system by SADRC strategy.

Piston displacement and piston error curve.
Figure 10 is the output voltage curve of the controller. It can be clearly seen from the Fig. 10 that the output voltage curves of the system under the two control strategies are basically the same. From the enlarged diagram in Fig. 10, it can be seen that although there are very small fluctuations in the output voltage curves by the two controllers, it does not affect the stability of the entire system.

Controller output voltage curve.
Figure 11 shows the switching signal of the SADRC system. From the Fig. 11, it can be seen that the switching signal only occurs once at 6 s, that is, the two subsystems generate a switching, which can achieve the stable operation of the entire control system.

Switching signal curve.
Slope response
In the absence of external disturbance, for slope control signals, set the slope of the slope to 6 mm/s and the simulation time to 10 s. The PID control parameters are: \(k_{p} = 10000\); \(k_{i} = 600\); \(k_{d} = 1000\); filter coefficient is \(N = 1000\). The parameters of the SADRC are consistent with Table 2.
The piston displacement curve and the piston error curve are shown in Fig. 12a,b respectively.

Piston displacement and piston error curve.
From Fig. 12a it can be seen that the system can effectively track the command signal under both control strategies. From Fig. 12b, it can be seen that the static error of the system under the PID control strategy is 0.5 mm, while the static error of the system under the SADRC strategy is 0.19 mm, and the position error is reduced by 0.52%. At the same time, it can be seen from Fig. 12b) that the error of the system under the SADRC control strategy will immediately reach the steady-state error value, which also shows that the control strategy can improve the rapidity of the system. Comparative analysis shows that the system can track command signals well under both control strategies. However, under SADRC, the static error of the system is effectively reduced, and the accuracy and rapidity of the system are improved.
Figure 13 is the output voltage curve of the controller. It can be clearly seen from the diagram that the output voltage curves of the system under the two control strategies are basically the same. However, the output voltage curves under the two control strategies have slight changes. which further proves the correctness of Fig. 12.

Controller output voltage curve.
Figure 14 shows the switching signal of the SADRC system. From the Fig. 14, the switching signal has not produced a switching during the operation of the system, which also indicates that the switching system has operated under the second type of nonlinear ESO and the closed-loop system maintains stable operation.

Switching signal curve.
Custom response
In the absence of external interference, for custom signals, set a slope of 30 mm/s for 0 ~ 2 s, then run steadily for 2 s, then run at a slope of -30 mm/s within 4 s, then run steadily for 2 s, and finally run at a slope of 30 mm/s. The PID control parameters are: \(k_{p} = 600000\); \(k_{i} = 500\); \(k_{d} = 1000\); filter coefficient is \(N = 1000\). The parameters of the SADRC are consistent with Table 2.
Figure 15a,b show the piston displacement curve and the piston error curve respectively. From the magnification curves in Fig. 15a,b, it can be seen that when the system is under the PID control strategy for 2 s ~ 4 s and 8 s ~ 10 s, the piston will produce obvious oscillation. Among them, the system error is the largest at 0 s ~ 2 s and 10 s ~ 12 s, and the maximum value is 0.1 mm; under the SADRC strategy, the piston basically has no chattering phenomenon. The system error is the largest at 0 s ~ 2 s and 10 s ~ 12 s, the maximum value is 0.05 mm, and the system comprehensive error is reduced by 0.17%. Through comparative analysis, it can be seen that the SADRC strategy can significantly improve the stability of the system and reduce the static error of the system, and effectively improve the system performance.

Piston displacement and piston error curve.
Figure 16 is the output voltage curve of the controller. It can be clearly seen from the figure that the output voltage curves of the system under the two control strategies are basically the same. However, when the system is under the PID control strategy for 2 s ~ 4 s and 8 s ~ 10 s, the output voltage of the controller is obviously oscillation, which further verifies the correctness of Fig. 15.

Controller output voltage curve.
Figure 17 shows the switching signal of the SADRC system. When the switching signal is only at about 8.05 s, two nonlinear ESOs produce a switching, which is designed to make the system run stably.

Switching signal curve.
In the absence of external disturbance, the system can be obtained from the above simulation analysis and comparison. In the case of step response, the response speed of the system under the SADRC strategy is 32.56% higher than that under the PID control strategy, and the error is reduced by 1.67%. In the case of sine response, the error of the system under the SADRC strategy is 0.67% less than that under the PID control strategy. In the case of slope response, the error of the system under the SADRC strategy is reduced by 0.52% compared with that under the PID control strategy. In the case of custom response, the error of the system under the SADRC strategy is reduced by 0.17% compared with that under the PID control strategy. When the command signal is different, the traditional the PID parameters need to be greatly modified, while the SADRC parameters do not need to be modified, which saves the workload.
Research on the performance of digital hydraulic cylinder position control system under square wave external disturbance
To further verify the influence of the control strategy designed in this paper on the system performance, the external disturbance force of the system is set to square wave force. The maximum driving load of the digital hydraulic cylinder designed in this paper is 2 T, so the set square-wave force is 10000N. When the system is in the step and ramp command signal, the external disturbance of the system is added between 5 s ~ 6 s. When the system is in the sine and custom command signal, the external disturbance of the system is added between 1.5 s ~ 2.5 s and 2.5 s ~ 3.5 s respectively, and then the tracking characteristics of the system are observed.
Step response
When the system is subjected to a square wave external disturbance force, Fig. 18a shows the piston displacement curve, Fig. 18b shows the piston error curve. From the enlarged curves in Fig. 18a,b, it can be seen that the system exhibits obvious fluctuations at 5 s ~ 6 s. From Fig. 18a it can be seen that the system cannot follow the command signal well under the PID control strategy. It can also be seen from Fig. 18b that the maximum steady-state error of the system is 1.3 mm at 6 s. When the system of SADRC strategy, the error is basically 0.1 mm and the position error is reduced by 2.0%. The system can track the command signal well. From the simulation comparison, it can be seen that the SADRC strategy can effectively improve the response speed of the system, reduce the static error of the system, enhance the anti-interference ability of the system, and improve the robustness performance of the system.

Piston displacement and piston error curve.
The Fig. 19 is the output voltage curve of the controller. It can be clearly seen from the Fig. 19, which the convergence effect of the system control output voltage under the SADRC strategy is significantly faster than the output voltage under the PID control strategy, and there is a slight change in 5 s ~ 6 s, which further verifies the correctness of Fig. 18.

Controller output voltage curve.
Figure 20 shows the switching signal curve of the SADRC system. It is obvious from the figure that the system switches once at about 2.5 s, and switches frequently at 6 s. Its purpose is to improve the stability of the system and ensure the stable operation of the system.

Switching signal curve.
Sine response
Figure 21a is the piston displacement curve and Fig. 21b is the piston error curve. When the system is subjected to a square wave external disturbance force, it can be seen from Fig. 21a that the system can track the command signal well under both control strategies, which is basically consistent with Fig. 9a. From Fig. 21b, it can be seen that when the system is at 2.5 s, the error of the system under the PID control strategy is larger than that under the SADRC strategy. At the same time, it can be seen from Fig. 21b that under the SADRC control strategy, the system first reaches the maximum error, so the control strategy can improve the rapidity of the system. Therefore, the SADRC strategy can effectively improve the disturbance rejection capability of the system and improve the robustness of the system.

Piston displacement and piston error curve.
Figure 22 is the output voltage of the controller. It can be seen from the amplification curve on the figure that when the system is 2.5 s, the disturbance of the output voltage under the PID controller is greater than that under the SADRC, which further verifies the correctness of Fig. 21.

Controller output voltage curve.
Figure 23 shows the switching signal curve of the SADRC system.

Switching signal curve.
From Fig. 23, it can be seen that the system did not switch during the external disturbance, but only one switch occurred at about 6 s to ensure the stability of the closed-loop system, which is consistent with Fig. 11 and ensures stable operation of the system.
Slope response
Figure 24a shows the piston displacement curve, and Fig. 24b shows the piston error curve. When the system is subjected to a square wave external disturbance, it can be seen from Fig. 24a that the system can track the command signal well under both control strategies. At 5 s, the magnification curve in Fig. 24a shows that the system will generate a fluctuation under both control strategies. It can be clearly seen from Fig. 24b that the maximum error of the system under the PID control strategy is 0.55 mm. When the system at 5 ~ 6 s, and the maximum error is 0.25 mm under the SADRC strategy. The system error fluctuation is reduced by 0.50%. Furthermore, it can be seen from Fig. 24b that the error of the system under the SADRC control strategy will immediately reach the steady-state error value, which also shows that the control strategy can improve the rapidity of the system. Therefore, the SADRC strategy can enhance the anti-disturbance capability of the system and improve the robust performance of the system. Through comparative analysis, it can be seen that the system can track the command signal well under both control strategies. However, under the SADRC, the static error of the system is effectively reduced, and the accuracy and rapidity of the system are improved.

Piston displacement and piston error curve.
Figure 25 is the output voltage of the controller.

Controller output voltage curve.
From the amplification curve on the graph, it can be clearly seen that when the system is in 5 s ~ 6 s, the disturbance of the output voltage under the PID controller is greater than the output voltage under the SADRC, which further verifies the correctness of Fig. 24.
Figure 26 shows the signal of the SADRC system. The switching signal did not produce any switching during the operation of the system, which is consistent with Fig. 14. This also shows that the switching system has been operated under the second nonlinear ESO to ensure the stability of the system.

Switching signal curve.
Custom response
Figure 27a shows the piston displacement curve and Fig. 27b shows the piston error curve. When the system is subjected to a square wave external disturbance, it can be seen from the amplification curves in Fig. 27a,b, which the system has the maximum error under the PID control strategy. When the system at 2.5 s ~ 3.5 s, there is obvious oscillation phenomenon, with a maximum error of 0.15 mm; when the system under the SADRC strategy, there is a slight oscillation phenomenon in the system between 2.5 s ~ 3.5 s, and the error size is basically zero, reducing the system oscillation error by 0.50%. Combining the system error and its anti-disturbance capability, it can be seen that SADRC can effectively reduce the system error and improve the anti-disturbance capability of the system.

Piston displacement and piston error curve.
Figure 28 is the output curve of the controller. It can be seen from the curve that the voltage signal output under the PID controller has obvious fluctuation when the system is in operation, while the voltage signal output under the SADRC basically has no fluctuation, which further verifies the correctness of Fig. 27.

Controller output voltage curve.
Figure 29 shows the switching signal curve of the SADRC system. It can be clearly seen from Fig. 29 that the system will be switched frequently when the square wave disturbance is added at 2.5 s ~ 3.5 s. The two nonlinear ESOs are continuously switched to ensure that the closed-loop system can achieve stable operation.

Switching signal curve.
In the case of external square wave disturbance, the system can be obtained from the above simulation analysis and comparison. In the case of step response, the error of the system under the SADRC strategy is 2.0% lower than that under the PID control strategy. In the case of sine response, the error of the system under the SADRC strategy is 0.67% lower than that under the PID control strategy. In the case of slope response, the error of the system under the SADRC strategy is reduced by 0.50% compared with that under the PID control strategy. In the case of custom response, the error of the system under the SADRC strategy is reduced by 0.50% compared with the PID control strategy.
Test verification
Verified the effectiveness of the SADRC strategy, and improved the performance of the digital hydraulic cylinder position control system. According to the existing conditions of the laboratory, a double closed-loop digital hydraulic cylinder prototype is developed, and a digital hydraulic cylinder position control system test bench is built. According to the principle of consistency between the simulation model and experimental construction, the digital hydraulic cylinder position control strategy experiment is carried out. The digital hydraulic cylinder test bench mainly includes several parts, such as a hydraulic pump station, double closed-loop digital hydraulic cylinder, displacement transducer, acquisition card and servo driver, as shown in Fig. 30. The parameters and equipment models of the digital hydraulic cylinder test bench are shown in Table 3. The displacement transducer has an accuracy of 0.01 mm, a resolution of 1 nm, and a frequency of 300 Hz/s.

Digital hydraulic cylinder test bench and testing site.
Ensure that the test conditions are consistent with the simulation conditions, in the absence of disturbances, compare the simulation and experimental results of the SADRC strategy and the PID control strategy.
Step response characteristic experiment
Figure 31 is the step response characteristic test curve and simulation curve of the digital hydraulic cylinder position control system based on PID control and SADRC.

Step response characteristic test and simulation curve.
Figure 31a is the piston displacement tracking curve under PID control and SADRC, and Fig. 31b is the piston displacement error curve under PID control and SADRC. It can be seen from Fig. 31a that the response time of the system under PID control is at about 5 s. It can be seen from Fig. 31b that the tracking error of the system under PID control is 1 mm, and the error accuracy is 1.67%. The response time of the system under SADRC is at about 3.2 s, the tracking error is 0.6 mm, and the error accuracy is 1.0%. It can be clearly seen from Fig. 31 that compared with PID control strategy, SADRC can improve the rapidity of the system and reduce the steady-state error of the system.
Sine response characteristic experiment
Figure 32 is the sine response characteristic test curve and simulation curve of the digital hydraulic cylinder position control system based on PID control and SADRC system. Figure 32a is the piston displacement tracking curve under the PID control and SADRC, and Fig. 32b is the piston displacement error curve under the PID control and the SADRC. From Fig. 32a, it can be seen that the time ___domain lag under the PID control is about 0.2 s. From Fig. 32b, it can be seen that the error of the system under PID control is \(\pm 8{\text{mm}}\), and the error accuracy is 13.33%. The system lags about 0.08 s in the time ___domain of the SADRC, and its error is between -3 mm ~ 5 mm and the error accuracy is 8.33%. It can be clearly seen from Fig. 32 that SADRC can reduce the phase lag of the system, and improve the steady-state accuracy of the system compared with the PID control strategy.

Sine response characteristic test and simulation curve.
Slope response characteristics experiment
Figure 33 is the slope response characteristic test curve and simulation curve of the digital hydraulic cylinder position control system based on PID control and SADRC. Figure 33a is the piston displacement tracking curve under the PID control and the SADRC. Figure 33b is the piston displacement error curve under PID control and SADRC. It can be seen from Fig. 33b that the maximum error of the system under PID control is 1 mm, the average error is 0.8 mm, and the error accuracy is 1.33%. The maximum error of the system under SADRC is 0.7 mm, the average error is 0.35 mm, and the error accuracy is 0.58%. It can be clearly seen from Fig. 33 that SADRC can reduce the steady-state error of the system, and improve the steady-state accuracy of the system compared with the PID control strategy.

Slope response characteristic test and simulation curve.
Custom response experiment
Figure 34 shows the customized response characteristic test curve and simulation curve of the digital hydraulic cylinder position control system based on the PID control and the SADRC. Figure 34a shows the piston displacement tracking curve of the system under the PID control and the SADRC strategies, while Fig. 34b shows the piston displacement error curve of the system under PID control and the SADRC strategies. From Fig. 34a, it can be seen that the overshoot of the system under PID control is 1.67% and the rise time is 0.23 s. From Fig. 34b it can be seen that the maximum errors of the system under the PID control are 2.5 mm and -2.4 mm respectively. When it is stable, the maximum error of the system is 2.1 mm, and the comprehensive error accuracy is 8.17%. The overshoot of the system under SADRC is 0.67%, and the rise time is 0.227 s. The maximum errors of the piston during extending and retracting under the SADRC are 2.1 mm and -2.1 mm, respectively. When system is stable, the maximum error of the system is \(\pm 0.3{\text{mm}}\), with a comprehensive error accuracy of 7.0%. From Fig. 34, it can be clearly seen that SADRC can improve the rapidity of the system compared with PID control strategy, which has reduced the steady-state error of the system and enhanced the overall performance of the system.

Customized response characteristic test and simulation curve.
From Figs. 31, 32, 33 and 34, it can be seen that the response speed of the system under the SADRC strategy is 1.30% higher than that under the PID control strategy, and the error is reduced by 1.17%. The experimental curve is basically consistent with the changing trend of the simulation curve. The output displacement of the digital hydraulic cylinder can track the command signal well, which proves the effectiveness of the control strategy.
Conclusion
Based on the principles of the ADRC strategy, the high-order state equation is transformed into a second-order integral series form. Integrating the features of switching control, we propose the SADRC strategy and establish the stability of the closed-loop system through Lyapunov theory and switching rules. We establish a simulation model for the digital hydraulic cylinder position control system by using MATLAB/Simulink, and examine the impact of various command input signals, including systems without external disturbances and those subjected to external square wave disturbances, on the dynamic characteristics of the digital hydraulic cylinder position control system through simulation studies. The simulation results demonstrate that the SADRC strategy significantly improves system response speed, showing a 32.56% increase compared to the PID control strategy, with a 2.0% reduction in error. Furthermore, experimental testing aligns well with simulation findings, showing consistent trends. The average error in system response speed is less than 9.0%, and the tracking error is less than 1.50%. Through the above simulation, it can be seen that the SADRC control strategy designed in this paper can effectively improve the rapidity and accuracy of the digital hydraulic cylinder control system. The experiments can verify the feasibility and effectiveness of the SADRC control strategy, and prove the superiority of the control strategy. The control parameters that need to be adjusted for this control strategy are significantly fewer than those outlined in reference3. It provides a theoretical basis for other electro-hydraulic servo control systems, and has certain engineering application value.
Data availability
We fully understand the SCI journal's requirements for data sharing, but due to the policy of our laboratory, we are unable to provide raw data at this time. If editors and reviewers have questions about specific data, we will do our best to provide more detailed explanations and clarifications. simultaneously,the datasets used and / or analysed during the current study available from the corresponding author on reasonable request.
References
Ma, C. L., Lin, H., Gao, Y. G. & Han, Y. Y. Co-simulation analysis of the single stage screw feedback digital hydraulic cylinder. J. Phys: Conf. Ser. 1633(1), 1–6 (2020).
Jiang, S. L., Wang, H. & Zhao, G. C. Research on neural network model reference adaptive disturbance rejection control of digital hydraulic cylinder. Adv. Mech. Eng. 14(12), 1–15 (2022).
Jiang, S. L., Huang, F. X., Liu, W. F., Huang, Y. W. & Chen, Y. A double closed: Loop digital hydraulic cylinder position system based on global fast terminal sliding mode active disturbance rejection control. IEEE Access 12, 80138–80152 (2024).
Wei, J. & Guo, B. Z. Observer design of a 1-d parabolic equation with disturbances generated by time-varying exosystems. Control Theory Appl. 40(08), 1408–1416 (2023).
Shi, H. T. et al. Research of fault detection method based on modified observer. Control Decis. 37(08), 2033–2039 (2022).
Tan, Q. et al. The research on the influence of different valve port on the performance of digital hydraulic cylinder. Mod. Manufact. Eng. 02, 131–137 (2020).
Qi, P. G. et al. Research on problem of feedback mechanism clearances of a digital hydraulic cylinder for shearer rocker Arms. China Mech. Eng. 34(02), 172–184 (2023).
Ma, C. L. et al. Mechanism modeling and simulink simulation analysis of digital hydraulic cylinder. J. Phys.: Conf. Ser. 1624(2), 66–72 (2020).
Kalaiarassan, G. & Krishnamurthy, K. Digital hydraulic single-link trajectory tracking control through flow-based control. Meas. Control 52(7–8), 775–787 (2019).
Pan, W., Zhu, S. J. & Xu, S. J. Research on the digital hydraulic cylinder nonlinear robust controlling methods with input saturation. J. Electron. Inf. Sci. 2(1), 46–50 (2017).
Wang, H. & Jiang, S. L. Research on control of digital hydraulic cylinder based on disturbance observer. Control Eng. China 26(09), 1776–1781 (2019).
Zhao, M. A. et al. Digital hydraulic cylinder system based on friction wheel feedback. Chin. Hydraul. Pneum. 45(3), 94–101 (2021).
Hu, X. R., Yu, W. H. & Li, X. Synchronization control of two digital hydraulic cylinders based on cross-coupling. J. Phys.: Conf. Ser. 2417(1), 1–7 (2022).
Duan, Z. J. et al. Research on servo valve-controlled hydraulic motor system based on active disturbance rejection control. Meas. Control 57(2), 113–123 (2024).
Wang, L. X. et al. ADRC for electro-hydraulic position servo system based on dead-zone compensation. China Mech. Eng. 23(5), 1432–1443 (2021).
He, H. F. et al. Adaptive fuzzy resilient control for switched systems with state constraints under deception attacks. Inf. Sci. 621, 596–610 (2023).
Yang, X. L. et al. Adaptive NN tracking control for periodically time-varying nonlinear switching systems. Int. J. Control Autom. Syst. 20(12), 4037–4049 (2022).
Lu, Y. Backstepping control of hypersonic vehicle based on tracking differentiator. Acta Aeronaut. Astronaut. Sin. 42(11), 438–449 (2021).
Guo, B. Z., Han, J. Q. & Xi, F. B. Linear tracking-differentiator and application to online estimation of the frequency of a sinusoidal signal with random noise perturbation. Int. J. Syst. Sci. 33(5), 351–358 (2002).
Gao, Y. et al. Robust coordinated decoupling control for hover/translation mode of V/STOL aircraft based on high-order LADRC. J. Beijing Univ. Aeronaut. Astronaut. 45(09), 1812–1823 (2019).
Du, X. & Chen, L. Fuzzy control of attitude and joint motion of free-floating space robot based on extended state observer. Mach. Des. Manufact. Eng. 48(5), 35–39 (2019).
Saeed, R. N. Model reference adaptive state-dependent Riccati equation control of nonlinear uncertain systems:Regulation and tracking of free-floating space manipulators. Aerosp. Sci. Technol. 84, 348–360 (2019).
Suhail, S. A., Bazaz, M. A. & Hussain, S. Adaptive sliding mode-based active disturbance rejection control for a quadcopter. Trans. Inst. Meas. Control 44(16), 3176–3190 (2022).
Gao, B. W. et al. Research on nonlinear control strategy of valve-controlled cylinder system based on improved LuGre friction model. J. Vib. Shock 42(11), 139–147+155 (2023).
Shi, Z. Y., Zhang, P. & Lin, J. C. Fuzzy ADRC method for EMA friction feedforward compensation. Electr. Mach. Control 27(12), 171–181+193 (2023).
Ma, P. J. et al. Nonlinear active disturbance rejection guidance law for highly maneuvering targets. Control Theory Appl. 40(05), 942–948 (2023).
Acknowledgements
This research was supported by the National Natural Science Foundation of China (52204169), National Natural Science Foundation of China (62276093), and the Heze University Doctoral Foundation (XY22BS18).
Author information
Authors and Affiliations
Contributions
Conceptualization, Jiang S L; methodology, Jiang S L.; software, Liu W F.; validation, Jiang S L. and Zhao G C; data curation, Cheng Y.and Zhang L.; writing—original draft preparation,Jiang S L. and Cheng Y.; writing—review and editing, Huang F X.; visualization, Jiang S L. and Liu W F.; supervision, Jiang S L.and Huang F X. and Zhang L. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Jiang, S., Zhao, G., Huang, F. et al. A double closed loop digital hydraulic cylinder position system based on switching active disturbance rejection control. Sci Rep 15, 1556 (2025). https://doi.org/10.1038/s41598-025-85640-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-85640-9
