
Abstract
An in-depth understanding of vibration characteristics of the coaxial pseudo-fault in axle-box bearings installed coaxially on both sides of the wheelset is essential for distinguishing the real fault and the pseudo-fault in axle-box bearing condition monitoring. Therefore, a bearing-vehicle-track coupled dynamic model is developed, which incorporates an axle-box bearing dynamic model with an outer ring defect and a vehicle-track coupled dynamic model. The axle-box vibration responses on both sides of the wheelset, considering single-sided bearing defects with different widths at different vehicle speeds, are obtained through simulation and subsequently analyzed. The results indicate that the coaxial pseudo-fault effect is more pronounced under a defect width of 3 mm. The amplitude, root mean square (RMS), and shock pulse method (SPM) indicators of the axle-box vibration response on the defective side exceed those on the healthy side. The impulse response transmitted to the healthy side consistently lags behind that generated on the defective side. The minimum lag time is 0.0011 s. The fault frequency components and harmonics on the healthy side are more dispersed and decay more rapidly. Finally, based on amplitude-related features and spectral energy dispersion characteristics, a criterion for identifying the coaxial pseudo-fault is proposed using the frequency variance (VF) indicator, and the rationality of the proposed indicator range is demonstrated through field test data.
Similar content being viewed by others
Introduction
The axle-box bearing, a critical component of the bogie in urban rail vehicles, is coaxially installed inside the axle-box housing on both sides of the wheelset. It plays a pivotal role in motion transformation and load transmission during vehicle operation1. Its performance directly influences the operational safety and quality of urban rail vehicles, making its condition monitoring essential to ensure service reliability. Typically, based on the axle-box vibration signals collected by the vibration-temperature compound sensor, the fault diagnosis system for bogie onboard is used to diagnose axle-box bearing faults and monitor their status2. However, due to the coaxial installation of the axle-box bearing, when a fault occurs on one side, the impulse response generated by the fault is transmitted through the wheelset, causing the fault characteristic to also be detected on the healthy side. This fault characteristic diagnosed on the healthy side is commonly referred to as a pseudo-fault3, or a false positive fault4. It presents a significant challenge to axle-box bearing condition monitoring and can easily result in misdiagnosis or missed diagnosis. Therefore, a thorough understanding of vibration characteristics of the coaxial pseudo-fault of the axle-box bearing is essential for distinguishing the real fault and the pseudo-fault and enhancing the accuracy of condition monitoring.
Overall, studies on vibration characteristics of the coaxial pseudo-fault and the false positive fault are relatively scarce in the reported literature. Most of the current research primarily focuses on the fault vibration characteristics of individual bearings, using either numerical simulations or experiments. Regarding to experimental tests, several experimental setups were developed to collect bearing vibration signals1,5,6,7,8. These test benches can simulate various bearing defects, speeds, and load conditions. Vibration acceleration data from the bearing housing was collected and analyzed to investigate bearing performance and fault characteristics. These data have also led to the development of various fault diagnosis methods1,5,8,9. Although experimental tests are the most effective and direct approach for obtaining bearing vibration characteristics, testing costs are high due to the need for modifications of bearing element structure for defect manufacture, and experimental conditions are often limited by the laboratory environment, making it difficult to fully replicate real operating conditions of bearings. In contrast, numerical simulation methods can not only simulate various real operating conditions of bearings but also have low computational costs and high efficiency, making them widely used in the study of faulty bearing vibration characteristics.
Currently, several types of simulation models have been developed to investigate the vibrational properties of faulty bearings10,11, such as the vibration monitoring model, the lumped-parameter model, the quasistatic model, the quasi-dynamic model, the finite element model, and the complete dynamic model. However, the research has shown that the vibration monitoring, lumped-parameter, quasistatic, and quasi-dynamic models are unable to accurately describe the motion process and internal dynamic interaction mechanisms of bearing elements due to their varying degrees of model simplification, which prevents them from clearly revealing the vibration characteristics caused by localized defects in the bearing elements11. Although vibration characteristics can be obtained using explicit dynamics analysis in finite element models, these models have high computational costs, making them more appropriate for simplified 2D models and transient dynamic analyses12. By contrast, the bearing complete dynamic model is more suitable for studying the vibration characteristics of faulty bearings. Meanwhile, in dynamic models of faulty bearings, bearing faults are typically represented as additional deformations in the contact pairs of bearing elements, and these deformations are fitted to describe localized surface defects of different shapes and severities13,14,15.
As numerous investigations into the fault vibrational properties of individual bearings have been extensively conducted, scholars have gradually recognized the phenomena of pseudo-faults and false positive faults in rotor systems3,4,16,17. Current research primarily focuses on extracting pseudo-fault features within the rotor system using the single-channel signal16,17, as well as studying the vibrational properties and diagnostic criteria for the false positive fault on both sides of the rotor based on dual-channel signals4. On one hand, to extract pseudo-fault features in coaxially installed rolling element bearing (REB) in rotor-bearing systems, a dynamic model of the rotor-bearing system incorporating a lumped-parameter model of the REB was developed to generate pseudo-fault signals under fixed rotational speeds and fault severities. Signal processing methods and indicators were proposed based on the single-channel pseudo-fault signals16,17. On the other hand, a dynamic model of the rotor-bearing system, considering the complete dynamic model of the REB, was developed to simulate the vibration interactions of supporting bearings with localized outer raceway defects at both ends of the rotor. The model, validated through experiments, was employed to analyze the unidirectional and bidirectional vibration interactions of supporting bearings under varying rotational speeds and defect widths. A fault diagnosis criterion for identifying the false-positive fault was then proposed based on the dual-channel signals at both ends of the rotor4. Obviously, the latter not only more accurately describes the dynamic behavior and vibration characteristics of faulty bearings, but its application scenario is also more aligned with the condition monitoring of axle-box bearings in urban rail vehicles using dual-channel signals from the axle-box housings on both sides of the wheelset2. However, in the studies mentioned above, whether considering the vibrational properties of individual bearings or those of two coaxially installed bearings, the focus has been on bearings under constant operating conditions, neglecting the actual operating environment of the bearing, such as the influence of external excitations. In practice, studies have demonstrated that both track excitation and wheel roundness have a significant influence on the contact load distribution and vibration response of the axle-box bearing18,19,20,21.
Naturally, it is essential to further consider the coupling effects between the bearing dynamic model and the vehicle-track coupled dynamic model. Several studies have introduced the coupled model integrating the axle-box bearing model with the vehicle-track dynamic model22,23,24,25,26. In these studies, double-row tapered roller bearings (DTRB) and double-row cylindrical roller bearings (DCRB), which are commonly used in the axle-box bearing of rail vehicles, were integrated into vehicle-track coupled dynamic models. The vibration response and contact load of axle-box bearings with localized defects and wheel roundness were analyzed in detail. However, in these models, all vehicle components were modelled as rigid bodies. In fact, vehicle components are not strictly rigid bodies, they inevitably undergo elastic deformation and vibration under external random excitations27. This deformation and vibration further influence the internal contact characteristics of the axle-box bearing, and thereby influence the vibration response. As a result, a series of vehicle components, such as the axle-box, wheelset, and gearbox, were modeled as flexible bodies to account for bearing defects and wheel-rail impact-induced elastic deformation and dynamic response19,21,28,29,30,31. The vibration characteristics of the axle-box and the internal contact forces within the bearing elements under multisource fault conditions were analyzed. The results indicated that the vibration response of the flexible model is more severe under wheel flat excitation21,28, further demonstrating the necessity of considering vehicle component flexibility. However, most bearing models in the aforementioned bearing-vehicle coupled dynamic models belong to the quasi-dynamic model, which primarily considers the balance equation of the internal static load of the bearing while neglecting the inertia forces and vibrations of the bearing elements. Furthermore, most bearing-vehicle coupled dynamic models focus on high-speed trains, while there is a lack of comprehensive rigid-flexible coupling dynamic models for investigating the vibration characteristics of faulty axle-box bearings in urban rail vehicles. Crucially, these models only examine the vibration response of the axle-box on the faulty side, without addressing the coaxial pseudo-fault characteristics of the axle-box on the healthy side.
Consequently, this paper aims to establish a rigid-flexible coupled bearing-vehicle-track spatial dynamic model for studying the coaxial pseudo-fault vibration characteristics of the axle-box bearing in urban rail vehicles. In this model, the DTRB is employed as the axle-box bearing, and its dynamic model considering six degrees of freedom of each rolling element is built and integrated into the vehicle-track coupled dynamic model of the B-type urban rail vehicle. In the vehicle-track coupled dynamic model, the wheelset, axle-box, and bogie frame are modeled as flexible bodies. The developed model is verified through field tests. Considering that outer ring raceway spalling is the most common fault in axle-box bearings during rail vehicle operation32, localized defects in the outer ring raceway are modeled to simulate axle-box bearing faults, with varying defect widths representing different fault severities. The defects with different widths are introduced into the axle-box bearing model on one side of the wheelset, and the dynamic responses of the axle-boxes on both sides of the wheelset are simulated using the developed model at different vehicle speeds. The coaxial pseudo-fault vibration characteristics of the axle-box bearing with outer ring defects are analyzed and discussed based on the simulation results. Based on these vibration characteristics, a criterion is developed to identify the coaxial pseudo-fault on both sides of the wheelset.
The remainder of this paper is organized as follows: Section “Problem formulation of the coaxial pseudo-fault for the axle-box bearing” describes the coaxial pseudo-fault problem of the axle-box bearing in condition monitoring. In Section “Simulation modelling of the coaxial pseudo-fault for the axle-box bearing with the outer ring defect”, a numerical simulation model is developed to study the coaxial pseudo-fault vibration characteristics, and its feasibility is verified through field tests. In Section “Simulation analyses and results discussion”, the coaxial pseudo-fault vibration characteristics under outer ring defects with different widths at different vehicle speeds are simulated and analyzed, and the vibration differences between the two axle-boxes are discussed. Conclusions are drawn in section “Conclusion”.
Problem formulation of the coaxial pseudo-fault for the axle-box bearing
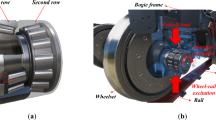
As shown in Fig. 1a, the axle-box bearings of urban rail vehicles are coaxially installed inside the axle-box housing on both sides of the wheelset, where they undertake the longitudinal, lateral, and vertical loads generated by the secondary suspension mass, traction or braking, and wheel-rail contact during vehicle operation. Therefore, their service performance is vital to ensure the safe operation of vehicles. The fault diagnosis system for bogie onboard is usually employed to monitor their service conditions through fault diagnosis based on vibration signals acquainted by acceleration sensors affixed to the axle-box2. However, field monitoring results have shown that when a defect occurs on one side of the axle-box bearing elements (i.e., the real fault), the impulse features caused by the defect are transmitted through the wheelset, resulting in fault characteristics also being detected in the vibration signal of the healthy axle-box bearing (i.e., the pseudo-fault). Figure 1b depicts the vibration characteristics of the axle-box bearings on both sides of a wheelset when a certain urban rail vehicle is running at a speed of around 64.5 km/h, significant impulse characteristics are observed in the time-___domain vibration signals of both the defective and healthy axle-box bearings, and the outer ring fault characteristic frequency (\(f_{\text{o}}\)) and its harmonic components are found in their envelope spectrum. Obviously, there is an extreme similarity between the real fault and the pseudo-fault. The presence of the pseudo-fault in the vibration signal of the healthy axle-box bearing poses a significant challenge to fault diagnosis, making it prone to misdiagnosis. Therefore, to prevent excessive and incorrect maintenance caused by misdiagnosis, it is essential to study the differences in vibration characteristics between real faults and pseudo-faults, thereby providing a theoretical reference for improving fault diagnosis algorithms in axle-box bearing condition monitoring.

Schematic diagram of the coaxial pseudo-fault in the wheelset-bearing system: (a) Schematic diagram of fault transmissions in the wheelset-bearing system; (b) Pseudo-fault phenomenon of the healthy axle-box bearing detected in the field test.
Simulation modelling of the coaxial pseudo-fault for the axle-box bearing with the outer ring defect
To simulate the vibration and fault transmission characteristics of a defective axle-box bearing more accurately, it is essential to consider the flexibility of vehicle components and the coupling effect between the vehicle and axle-box bearings27. Thus, a comprehensive rigid-flexible coupled DTRB-vehicle-track spatial dynamic model is developed by integrating the rigid-flexible coupled vehicle-track spatial dynamic model with the DTRB dynamic model in this section. The DTRB dynamic model with the outer ring defect is formulated in section “Dynamic modelling of the axle-box bearing with outer ring defect”. It is subsequently incorporated into the rigid-flexible coupled vehicle-track spatial dynamic model in section “Bearing-vehicle-track coupled dynamic model for studying coaxial pseudo-fault characteristics”. Its feasibility is verified in section “Experimental verification of the developed model”. The modelling details are as follows.
Dynamic modelling of the axle-box bearing with outer ring defect
This paper adopts the DTRB with a back-to-back arrangement as the axle-box bearing of the urban rail vehicle, as depicted in Fig. 2. It consists of two inner rings, a spacer, two cages, an outer ring, and several rollers. The inner ring has dual-sided ribs, and the cages are supported and guided by the rollers. The outer ring is mounted within the axle-box housing through a transitional fit, while the inner ring is installed at the axle end of the wheelset through an interference fit. In the modeling process, it is assumed that both the outer ring and the inner ring are rigidly fixed within the axle-box housing and at the axle end of the wheelset. Bearing elements are treated as rigid bodies. Disregarding the stiffness and damping of elastohydrodynamic lubrication, only the contact force and friction between the elements are considered.

Schematic diagram of the wheelset-bearing system and the DTRB.
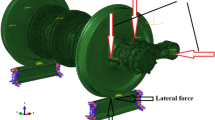
Figure 3 depicts the loading process of the axle-box bearing and the force analysis between its elements. It can be seen from Fig. 3a,b that, due to the combined action of the vertical load caused by the suspension mass and the lateral load caused by wheel-rail guidance, relative radial and axial displacements occur between the outer ring (i.e., the axle-box) and the inner ring (i.e., the wheelset), causing the rollers to be compressed by the raceway to generate internal contact forces that balance the external vertical and lateral loads. Throughout the entire load-bearing process, the relative radial and axial displacements of the k-th roller at the azimuth angle \(\varphi_{{\text{r}\left( {\text{L,R}} \right)ijk}}\), between the rollers and the outer ring, as well as between the rollers and the inner ring, can be determined as follows26.
where \(\delta_{{\text{r}\left( {\text{L,R}} \right)ijk}}^{{\text{o(i)}}}\) and \(\delta_{{\text{a}\left( {\text{L,R}} \right)ijk}}^{{\text{o(i)}}}\) represent the relative radial and axial displacement between the roller and outer (inner) ring respectively. \(X_{{\text{ab(L,R)}i}}\), \(Y_{{\text{ab(L,R)}i}}\), \(Z_{{\text{ab(L,R)}i}}\), \(X_{{\text{r(L,R)}ijk}}\), \(Y_{{\text{r(L,R)}ijk}}\), \(Z_{{\text{r(L,R)}ijk}}\), \(X_{{\text{w}i}}\), \(Y_{{\text{w}i}}\), and \(Z_{{\text{w}i}}\) are the longitudinal, lateral and vertical displacements of the axle-box, the roller, and the wheelset in the global coordinate system respectively. \(\alpha_{{\text{w}i}}\) and \(\gamma_{{\text{w}i}}\) are the roll and yaw angles of the wheelset. \(d_{\text{w}}\) is the lateral semi-span of primary suspensions. \(h_{{\varphi \text{r}\left( {\text{L,R}} \right)ijk}}\) is the initial clearance33, \(h_{{\varphi \text{r}\left( {\text{L,R}} \right)ijk}} = 0.5u_{\text{r}} \left( {1 - \cos \varphi_{{\text{r}\left( {\text{L,R}} \right)ijk}} } \right)\). \(u_{\text{r}}\) and \(u_{\text{a}}\) are the bearing radial and axial clearance respectively. The superscripts “o” and “i” represent the outer and inner rings respectively. The subscript i denotes the number of the wheelset, i = 1–4. The subscript j denotes the number of DTRB rows, j = 1–2. The subscript k denotes the number of each roller, k = 1–N. N is the count of single-row rollers. The subscripts “L” and “R” represent the left and right sides of the urban rail vehicle along the running direction respectively. Moreover, the contact azimuth angle of the k-th roller can be calculated by:
where \(\omega_{\text{c}}\) is the rotation angular velocity of the cage, \(\omega_{\text{c}} = \frac{1}{2}\left( {1 - \frac{{D_{\text{b}} }}{{D_{\text{m}} }}} \right)\omega_{\text{w}}\). \(\omega_{\text{w}}\) is the rotation angular velocity of the wheelset. \(D_{\text{m}}\) is the pitch diameter. \(D_{\text{b}}\) is the average diameter of a tapered roller.

Contact relationship and force analysis of the axle-box bearing: (a) Schematic diagram of the loaded axle-box bearing; (b) Schematic of force analysis for the axle-box bearing; (c) Schematic diagram of force analysis on cage and roller; (d) Schematic diagram of force analysis on the roller.
Thus, the elastic deformation that occurs between the roller and the outer ring raceway, between the roller and the inner ring raceway, as well as between the rollers and the ribs of the inner ring, can be calculated by:
where \(\alpha_{\text{o}}\) and \(\alpha_{\text{i}}\) represent the contact angle of the roller-outer ring raceway and roller-inner ring raceway respectively. \(\alpha_{\text{f}}\) represents the inner ring guiding rib angle.
Correspondingly, in Fig. 3b, the contact force between the roller and raceways, as well as between the roller and the guiding rib can be obtained according to the load-deformation relationship based on the Hertzian line contact theory and the Hertzian point contact theory, they are expressed as33,34,35:
where \(K_{{\text{ro}(\text{i})}}\) and \(K_{\text{a}}\) are the equivalent contact stiffness of the roller-raceway and the roller-rib. \(C_{{\text{ro}(\text{i})}}\) and \(C_{\text{a}}\) are the equivalent contact damping of the roller-raceway and the roller-rib. Due to the contact damping in the bearing is commonly about 2.5 × 10−5–0.25 times of the stiffness6, thus all equivalent contact damping is set to 1 × 10−3 times of itself contact stiffness in this paper.
Thereinto, the equivalent contact stiffness \(K_{{\text{ro}(\text{i})}}\) of the roller-raceway can be calculated by33:
where \(L_{\text{e}}\) is the effective contact length, which can be determined by:
where \(L_{\text{b}}\) is the roller length, as seen in Fig. 3. And index \(c_{i}\) in Eq. (5) can be obtained by:
where \(\alpha^{\prime}_{\text{f}}\) is the contact angle of the roller-inner ring guiding rib, \(\alpha^{\prime}_{\text{f}} = {\raise0.7ex\hbox{$\pi $} \!\mathord{\left/ {\vphantom {\pi 2}}\right.\kern-0pt} \!\lower0.7ex\hbox{$2$}} - \alpha_{\text{f}}\).
Moreover, the equivalent contact stiffness \(K_{\text{a}}\) of the roller-rib in Eq. (4b) can be calculated by34
where \(\delta^{ * }\) is a coefficient dependent on contact geometry. \(\sum \rho\) is the curvature sum.
Figure 3c shows the force analysis diagrams of the roller and the cage. Due to the fact that the cage mainly performs circular motion, its function is to isolate and guide roller movement, so that its force mainly occurs in the circumferential direction during the operation of the bearing. For this reason, the axial contact force between the roller and the cage side-beam is usually ignored in the DTRB dynamic model35. Similarly, the contact between the roller and the cage crossbeam is mainly considered in this paper, and the contact type is considered as the Hertzian line contact. Thus, the contact force between the k-th roller and the cage crossbeam is described as:
where \(K_{{\text{cr}}}\) and \(C_{{\text{cr}}}\) are the equivalent contact stiffness and damping between the roller and the cage. \(\delta_{{\text{cr}(\text{L,R})ijk}}\) is the contact deformation between the roller and the cage crossbeam, it can be determined by the relative kinetic relationship between the roller and the cage36. In Fig. 3c, \(\alpha_{\text{c}}\) represents the pressing slope angle of the cage pocket. The equivalent contact stiffness \(K_{{\text{cr}}}\) in Eq. (9) can be determined by the Palmgren’s empirical formula37.
where \(E^{\prime}\) is the equivalent elastic modulus, which can be obtained by:
where \(E_{\text{r}}\), \(E_{\text{c}}\), \(\varepsilon_{\text{r}}\), and \(\varepsilon_{\text{c}}\) are the elastic modulus and Poisson’s ratio of the roller and the cage respectively.
Figure 3d displays the schematic of the roller force analysis. The normal contact forces of the roller-raceway, the roller-rib and the roller-cage in the figure are given in Eqs. (4) and (9). The remaining forces in the figure include the axial and tangential frictions between the roller and the outer (inner) ring raceway (\(f_{{\text{r}\left( {\text{L},\text{R}} \right)ijk}}^{{\text{o(i)a}}}\) and \(f_{{\text{r}\left( {\text{L},\text{R}} \right)ijk}}^{{\text{o(i)}}}\)), the tangential friction between the roller and the rib (\(f_{{\text{a}\left( {\text{L},\text{R}} \right)ijk}}^{\text{i}}\)), the axial and tangential frictions between the roller and the cage (\(f_{{\text{cr}\left( {\text{L},\text{R}} \right)ijk}}^{\text{a}}\) and \(f_{{\text{cr}\left( {\text{L},\text{R}} \right)ijk}}\)). They can be calculated through the conventional friction force model38. Namely, they are equal to the products of the normal contact force and the corresponding friction coefficients.
Subsequently, based on Newton’s law of motion, the dynamic differential equations of the roller for the DTRB can be determined as follows:
where \(M_{\text{r}}\) is the mass of the roller. \(J_{{\text{r}x}}\), \(J_{{\text{r}y}}\), and \(J_{{\text{r}z}}\) are the mass moment of inertia of the roller about X/Y/Z-axis respectively. \(\alpha_{{\text{r(L,R)}ijk}}\), \(\beta_{{\text{r(L,R)}ijk}}\), and \(\gamma_{{\text{r(L,R)}ijk}}\) are the rotation angle of the roller about X/Y/Z-axis respectively. \(h_{\text{r}}\) is the contact point height of the roller-rib, as seen in Fig. 3d. When j = 1, the “\(\mp\)” and “\(\pm\)” take the symbol above. When j = 2, the “\(\mp\)” and “\(\pm\)” take the symbol below.
Likewise, the dynamic differential equations of the cage for the DTRB can be determined as follows:
where \(M_{\text{c}}\) is the mass of the cage. \(J_{{\text{c}x}}\), \(J_{{\text{c}y}}\), and \(J_{{\text{c}z}}\) are the mass moment of inertia of the cage about the X/Y/Z-axis respectively. \(X_{{{\text{c}}\text{(L,R)}ij}}\), \(Y_{{{\text{c}}\text{(L,R)}ij}}\), \(Z_{{{\text{c}}\text{(L,R)}ij}}\), \(\alpha_{{\text{c(L,R)}ij}}\), \(\beta_{{{\text{c}}\text{(L,R)}ij}}\), and \(\gamma_{{{\text{c}}\text{(L,R)}ij}}\) are the translational and rotational motion of the cage in six degrees of freedom respectively.
Furthermore, the localized defect needs to be considered in the above dynamic model to develop a dynamic model of the axle-box bearing with the outer ring defect, as shown in Fig. 4a. The localized defect is typically characterized as additional deformations in the contact pair of the roller-raceway13,14. It can be seen from Fig. 4b that when the k-th roller at the azimuth angle passes through the defect of length L, width W, and depth H, the additional clearance caused by the defect can be expressed as14:
where \(A\) is the maximum value of clearance variation, \(A = r_{\text{b}} - \sqrt {r_{\text{b}}^{2} - \left( {{\raise0.7ex\hbox{$W$} \!\mathord{\left/ {\vphantom {W 2}}\right.\kern-0pt} \!\lower0.7ex\hbox{$2$}}} \right)^{2} }\). \(r_{\text{b}}\) is the radius of the roller, \(r_{\text{b}} = 0.5D_{\text{b}}\). \(\theta_{\text{o}}\) is the initial offset angle between the outer ring defect and the first roller, it is set to 0 in this paper. \(\tau_{\text{o}}\) is the angle corresponding to the outer ring defect, \(\tau_{\text{o}} = 2\arcsin \left( {{\raise0.7ex\hbox{$W$} \!\mathord{\left/ {\vphantom {W {D_{\text{o}} }}}\right.\kern-0pt} \!\lower0.7ex\hbox{${D_{\text{o}} }$}}} \right)\). \(D_{\text{o}}\) is the diameter of the outer ring raceway.

Mathematical characterization of outer ring defect in the axle-box bearing: (a) Defect on the outer ring raceway; (b) Local stretch-out view and geometric relationship of the outer ring defect.
Consequently, the elastic deformation of the roller-outer ring raceway in Eq. (3a) is redefined as follows:
Combining Eqs. (14), (15) and Eqs. (1) to (13), the dynamic model of the axle-box bearing with outer ring defect will ultimately be determined.
Simultaneously, the resultant forces acting on the outer ring (i.e., axle-box) and the inner ring (i.e., wheelset) in longitudinal, lateral, and vertical directions can be obtained by:
where \(\lambda\) is a switching value. When the superscript is “i”, \(\lambda = 1\), otherwise, \(\lambda = 0\). When the superscript is “o” or “i”, the “\(\mp\)” and “\(\pm\)” take the symbol above or below.
Bearing-vehicle-track coupled dynamic model for studying coaxial pseudo-fault characteristics
Figure 5 illustrates the bearing-vehicle-track coupled dynamic model established in this paper for the study of coaxial pseudo-fault characteristics. This model integrates the vehicle-track coupled dynamic model of the B-type urban rail vehicle with the DTRB dynamic model serving as the axle-box bearing. Hereinto, the vehicle-track coupled dynamic model is built on the SIMPACK platform. The flexibilities of the front bogie are only considered to improve computational efficiency. Based on the GUYAN substructure modal reduction method39, the FEMBS module is employed to construct flexible wheelsets, flexible axle-boxes, and the flexible bogie frame. The LM wheel tread profile and the CHN 60 rail profile are utilized, and the FASTSIM algorithm is used to solve the wheel-rail contact relationship. The axle-box bearing model is modeled as two dummy bodies, two time-excitation force elements (i.e., No. 93 force element in SIMPACK), and a revolute joint. Dummy body 1 and the revolute joint realize the rotational motion between the wheelset and the axle-box. Dummy body 2 and two equivalent force elements are employed to transmit the resultant forces in Eq. (16) between the roller and the outer ring (i.e., the axle-box), as well as between the roller and the inner ring (i.e., the wheelset) through the SIMAT co-simulation interface. The DTRB dynamic model is developed in the MATLAB/Simulink platform, based on the theoretical foundation in section “Dynamic modelling of the axle-box bearing with outer ring defect”.

The developed bearing-vehicle-track coupled dynamic simulation model.
Its numerical simulation process is shown in detail in Fig. 6. The dynamic response and internal contact forces of the axle-box bearing are sequentially calculated according to the flow shown in the figure. The co-simulation process of the axle-box bearing and the vehicle dynamic model is conducted in the dashed box. The calculated resultant forces are applied to the axle-box and wheelset of the vehicle dynamic model via the SIMAT co-simulation interface to determine the dynamic responses of the vehicle system. Meanwhile, the vibration responses of the axle-box (i.e., the outer ring) and the wheelset (i.e., the inner ring) are input back into the DTRB dynamic model via the co-simulation interface to update the displacement parameters in Eq. (1). At the next time step, the new relative displacement and elastic deformation are then calculated, and the dynamic responses of the bearing elements are obtained. This process is iterated until the simulation is complete.

Flow chart of numerical simulation of the coaxial pseudo-fault characteristic.
Experimental verification of the developed model
Figure 7 illustrates the experimental equipment and layout for the feasibility verification of the established model. The field test is conducted on a typical B-type subway train running on urban rail lines. The vibration response and status of the axle-box bearing are obtained from the fault diagnosis system for bogie onboard2. The diagnosis system comprises the compound-sensor, the pre-processor, and the master unit onboard. The compound-sensor is fixed on the axle-box housing to pick up the vibration response and temperature of the axle-box bearing, with this study focusing solely on the vibration feature. The master unit onboard controls the pre-processor for signal sampling and acquisition from the compound-sensor, and the signal sampling frequency is 10 kHz. The acquired signals are transmitted to the master unit onboard through the data bus, and the master unit onboard then performs the fault diagnosis of the axle-box bearing. According to the diagnostic results provided by the fault diagnosis system, it was identified that there is a 1-level alarm for an outer ring fault in the axle-box bearing near the gearbox side of wheelset 2. Although there is no alarm on the other side of the coaxial axle-box bearing, pseudo-fault characteristics are still present in its vibration response signal, and this phenomenon has been illustrated in Fig. 1. Therefore, we verify the feasibility of the developed model by comparing the vibration acceleration of the axle-box on both sides of wheelset 2 with the simulation results. To solve the axle-box dynamic model listed in Eqs. (12) and (13), a Runge–Kutta method based on a constant time step (1 × 10−4 s) is utilized. The main parameters of the DTRB used in this study are listed in Table 1.

Composition of the fault diagnosis system for bogie onboard and the schematic of its data acquisition.
Figure 8 presents a comparison of experimental and simulation results on the vibration acceleration for both the defective and healthy axle-box bearings on both sides of the wheelset, as well as time histories of their contact forces. In this comparison, the vehicle speed is 48 km/h. The American 5-class track spectrum is utilized as track irregularity excitation in the simulation model, and the size of the outer ring defect is set to 50.4 mm × 2 mm × 2 mm (L × W × H) in row 2. From Fig. 8a, it is evident that the time-___domain vibration acceleration of the defective axle-box bearing exhibits significant periodic impulse characteristics, with amplitudes and impulse time intervals being comparable, showing amplitudes of approximately 20 m/s2 and time intervals of 0.023 s. The corresponding impulse frequency is 43.48 Hz, which closely matches the outer ring fault characteristic frequency (43.93 Hz), with the slight discrepancy attributed to the inevitable roller slip. By comparing their envelope spectrum, it is observed that both contain outer ring fault characteristic frequency components and harmonics, with their main frequencies being similar. Likewise, as shown in Fig. 8b, on one side of the healthy axle-box bearing, time-___domain periodic impulse characteristics are present in both experimental and simulation results, and their amplitudes and impulse time intervals are also close. In their envelope spectrum, the experimental results are generally consistent with the simulation results regarding the outer ring fault characteristic frequency components and harmonics. Moreover, the vibration amplitude of the axle-box on the healthy side is lower than that of the defective side, and the pseudo-fault features on the healthy side in the experimental results are less distinct than those observed in Fig. 1. From the experimental results in Fig. 8a,b, except for the outer ring fault features, it can also be seen that a series of frequency components, approximately 5.3 Hz, 10.3 Hz, 15.7 Hz, etc., especially on the healthy side, which closely matches the rotational frequency (\(f_{\text{r}} = 5.1\) Hz) and its harmonics. However, these frequency components are not visible when the vehicle operates at a speed of 64.5 km/h, as shown in Fig. 1. This indicates that vehicle speed significantly influences the magnitude of the wheelset rotational frequency and the pseudo-fault components. Figure 8c shows that the shape of the contact force is approximately sinusoidal and exhibits periodic variation over time. The revolution period of one roller is about 0.456 s. The corresponding contact frequency is 2.193 Hz, which closely matches the cage rotational frequency (2.196 Hz). Meanwhile, the periodic impulse of the contact force caused by defects is observed in row 2 of the defective axle-box bearing. The above results demonstrate that the established simulation model accurately simulates the vibration phenomenon of coaxial pseudo-fault. Although there are still deviations in the fault frequency and harmonic amplitudes in the spectrum, these deviations are inevitable due to differences in working conditions, such as track irregularities, load conditions, inconsistent vibration modes of the flexible body, different slip ratios of bearing elements, and differences in defect shape. Since the paper focuses on the vibration feature trends of the axle-box bearing, the aforementioned differences are acceptable. Therefore, the proposed model is reasonable and can be used for the study of coaxial pseudo-fault features.

Comparison of the experimental data and simulation data on coaxial pseudo-fault characteristics: (a) Comparison of experimental and simulation results on the defective axle-box bearing; (b) Comparison of experimental and simulation results on the healthy axle-box bearing; (c) Time history of contact force between the roller and the outer raceway of healthy and defective axle-box bearings.
Simulation analyses and results discussion
From Figs. 1b, 8b, it is evident that the coaxial pseudo-fault effect generated by the same fault on the healthy side differs when the vehicle operates at 64.5 km/h and 48 km/h, respectively. Therefore, fault severity and speed factors are taken into account in this study, and three outer ring defect widths are defined within the developed dynamic model to simulate and study the vibration characteristics of coaxial pseudo-faults under different vehicle operating speeds. Hereinto, the defect widths are 1 mm, 3 mm, and 5 mm, and the vehicle speeds are 20 km/h, 40 km/h, 60 km/h, and 80 km/h, respectively. Consistent with the field test, the defective axle-box bearing is positioned on wheelset 2, adjacent to the gearbox. The vibration acceleration responses of the axle-box on both sides of wheelset 2 are obtained from the simulation model and defined as the defect side and healthy side, respectively. The root mean square (RMS) and the shock pulse method (SPM) are used to evaluate the fault severity of the axle-box bearing on both sides of the wheelset. Specifically, the SPM is an empirical method used to quantify the severity of bearing faults, providing a standard decibel value (dB) highly correlated with the bearing condition, and is expressed as40:
where \(n_{\text{b}}\) is the rotational speed of the bearing (i.e. the rotational speed of the wheelset). \(D\) is the bearing inside diameter. \(SV\) is the quantification value of fault impacts, it is calculated by demodulating the intrinsic mode functions (IMFs) of the vibration signal decomposed by the empirical mode decomposition (EMD) in this paper40. When \(0 \le SPM < \text{21 dB}\), it indicates that axle-box bearing is in normal condition; When \(\text{21 } \le SPM \le \text{35 dB}\), it indicates that there is a mild fault in the axle-box bearing; When \(\text{35 } < SPM \le \text{60 dB}\), it indicates that there is a serious fault in the axle-box bearing.
Vibration characteristics of axle-boxes on both sides under different outer ring defect widths and vehicle speeds
Figure 9 illustrates the vibration characteristics of the axle-boxes on both sides of wheelset 2 under different vehicle speeds and outer ring defect widths in time ___domain. The defect side represents the real fault, while the healthy side represents the pseudo-fault. It is evident from the figure that when the defect width is 1 mm, the impulse features caused by the defect cannot be visually observed, as they are buried in intense wheel-rail noise and vibration from bearing elements. Moreover, only weak impulse features can be visually observed on the healthy side when the vehicle speed exceeds 40 km/h. By contrast, when the defect widths are 3 mm and 5 mm, there are clear periodic impulses in the vibration signals of the axle-boxes on both the defect and healthy sides. The periodicity of the impulse is depicted in the figure when the vehicle is running at 40 km/h. As depicted in the figure, the impulse period of the axle-box vibration on both sides of the wheelset is about 0.027 s under different defect widths, and the corresponding impact frequency is around 37.04 Hz, which is approximately equal to the fault characteristic frequency of the outer ring (36.60 Hz). The slight deviation is caused by the inherent internal slip of the rolling elements. These results indicate that the vibration signals of the axle-boxes on both sides of the wheelset exhibit the outer ring fault characteristic, i.e., the coaxial pseudo-fault characteristic. From their impulse amplitude in time ___domain, it is observable that when the defect widths are 3 mm and 5 mm, the coaxial pseudo-fault phenomenon becomes notably more pronounced. With a 1 mm defect, only a weak pseudo-fault phenomenon occurs when the speed exceeds 40 km/h. In addition, the acceleration amplitude of the axle-boxes on both sides increases with increasing vehicle speed and defect width.

Time-___domain vibration characteristics of axle-boxes on both sides of the wheelset under different vehicle speeds and outer ring defect widths.
Figure 10 illustrates the envelope spectrum of vibration response for the axle-boxes on both sides under different vehicle speeds and defect widths. The amplitude of the envelope spectrum has been normalized to highlight fault frequency components. The fault frequency components and their harmonics on the defect side are clearly visible and increase with vehicle speed, while the amplitude of the harmonics decreases monotonically with increasing frequency. Additionally, when the defect width exceeds 3 mm and the vehicle speed exceeds 60 km/h, sidebands modulated by the cage rotation frequency around the harmonics can be observed. In contrast, when the defect width is 1 mm and the vehicle speed is 80 km/h, fault frequency components and their harmonics are not observed on the healthy side. For other defect widths and vehicle speeds, although fault frequency components and their harmonics are observable on the healthy side, their amplitudes do not decrease monotonically with frequency increase, and the harmonic amplitude decays rapidly, particularly when the defect width is 5 mm. Overall, when the defect width is 3 mm, pseudo-fault features on the healthy side are relatively pronounced across different vehicle speeds.

Envelope spectrum of vibration response of axle boxes on both sides of the wheelset under different vehicle speeds and outer ring defect widths.
Figure 11 shows a comparison of quantitative indicators for fault severity on both sides of the wheelset. The RMS indicators reveal that the variation trend on both the defect side and healthy side is consistent, increasing monotonically with vehicle speed and defect width. Additionally, the SPM indicators show that the SPM value increases gradually with defect width. On the defect side, the SPM value reaches its maximum at a vehicle speed of 20 km/h and decreases with increasing speed. According to quantitative criteria for bearing fault severity40, when the defect width is 3 mm or 5 mm, the axle-box bearing on the defect side is classified as a serious fault. The axle-box bearing on the healthy side is classified as a serious fault at 20 km/h and a mild fault at speeds above 40 km/h. On the defect side, with a 1 mm defect and vehicle speeds under 40 km/h, the axle-box bearing is classified as a mild fault. At speeds above 60 km/h, the bearing is considered normal. On the health side, the bearing condition is classified as normal. Therefore, although both indicators on the defect side are higher than on the healthy side, it is still insufficient to distinguish between a real fault and a pseudo-fault, except in the case of a 1 mm defect width.

Statistical features of the axle-box vibration on both sides of the wheelset under different vehicle speeds and outer ring defect widths: (a) Comparison of the RMS indicators; (b) Comparison of the SPM indicators.
Difference analyses of the axle-box vibration on both sides of the wheelset
To distinguish between the real fault and pseudo-fault of the axle-box bearings on both sides of the wheelset, it is essential to further analyze their differences. Due to the relatively significant coaxial pseudo-fault characteristics under a defect width of 3 mm, the time-___domain and frequency-___domain responses of the axle-box vibration on both sides, at different vehicle speeds, are compared and shown in Fig. 12. Aside from the fact that the vibration amplitude on the healthy side is smaller than that on the defective side, the figure indicates that the impulse response transmitted to the healthy side consistently lags behind the impulse response generated on the defective side. From Fig. 12, a comparison of the frequency spectra reveals that the fault frequency components and harmonics on the defective side are more continuous and concentrated, and their amplitudes gradually decrease with increasing frequency. In contrast, the frequency components on the healthy side are relatively dispersed, splitting into two distinct ranges: approximately 0–200 Hz and 300–800 Hz. Thereinto, the frequency corresponding to the maximum amplitude in the latter frequency range (highlighted in the dashed box) is approximately 546 Hz, which corresponds exactly to the 2nd bending mode frequency of the wheelset. As vehicle speed increases, the amplitude of the vibration response within this frequency range grows larger, and the frequency features become more distinct. This suggests that the pseudo-fault response on the healthy side is modulated by the vibration modal responses of vehicle components during transmission. In a consequence, the frequency distribution of the pseudo-fault response on the healthy side is relatively scattered, and the amplitude of its frequency components does not exhibit significant monotonicity. The distribution and amplitude of these components are determined by the modal frequency range of the vehicle components. Notably, vibration model responses of the flexible bogie frame and the flexible axle-box also have a modulating effect on pseudo-faults, but the influence of the flexible wheelset is the most direct and significant.

Comparison of vibration characteristics of the axle-box on both sides in time ___domain and frequency ___domain under 3 mm defect width.
Furthermore, the lag time of the impulse response between the defect side and the healthy side for three defect widths at different vehicle speeds is further depicted in Fig. 13. It can be seen from the figure that the minimum lag time is 0.0011 s, while the maximum lag time is 0.0042 s. The lag time is primarily concentrated between 0.0011 s and 0.0013 s. The longest lag time occurs at 20 km/h for each defect width condition, and the lag time increases proportionally with defect width. Additionally, as the vehicle speed increases, the lag time gradually decreases, reaching approximately 0.0013 s. Although time-lag is a typical property of the coaxial pseudo-fault, it is difficult to obtain the time parameter of its impulse generation owing to the weak fault impulse features, such as the 1 mm defect shown in Fig. 9. Particularly under the influence of intense wheel-rail noise, these features are more easily submerged. On the whole, except for the RMS and SPM features, the spectral dispersion is another critical feature for distinguishing between the real fault and the pseudo-fault.

Time lag analysis of the axle-box vibration on both sides under different defect widths and vehicle speeds.
The frequency variance (VF) is an effective indicator to describe the dispersion of spectral energy. The smaller the VF indicator, the more concentrated the spectral energy; Otherwise, the more dispersed it is. Therefore, it is employed to evaluate the difference of the real fault and pseudo-fault signals, and is described as41:
where \(f\) represents the signal frequency. \(S\left( f \right)\) is the power spectral density function of signal. \(FC\) is the frequency center, it can be obtained by Ref.25. In addition, the difference in VF indicators between the axle-box vibration responses on both sides of the wheelset is utilized to quantify the influence of the coaxial pseudo-fault.
Figure 14 presents a statistical comparison of the spectral dispersion of the axle-box vibration response on both sides of the wheelset under non-defect and various defect width conditions at different operating speeds. Clearly, compared to conditions with bearing defects, the VF indicator of the axle-box vibration response without defects, as shown in Fig. 14a, is approximately 10 to 100 times smaller, with the difference in VF indicators being about 10 times smaller. This demonstrates a significant distinction in the axle-box vibration response between conditions with and without bearing defects. In Fig. 14a, the deviation of the VF indicator in non-defect conditions arises from axle-load transfer induced by the gearbox, leading to inconsistent loads and responses on the left and right wheels. Figure 14b–d show that when a defect exists in the axle-box bearing on one side of the wheelset, the VF indicators of the axle-box vibration responses on both sides increase significantly, along with a marked rise in the difference between their VF indicators. For defect widths of 3 mm and 5 mm, the VF indicator of the healthy side consistently exceeds that of the defective side at each speed condition. However, for a defect width of 1 mm and speeds below 40 km/h, the VF indicator of the healthy side is greater than that of the defective side. This suggests that spectral dispersion characteristics can be effectively utilized to distinguish between pseudo-faults and real faults under these conditions. As shown in Fig. 14b–d, if the difference in VF indicators between the axle-box vibration responses on both sides ranges from 0.8 × 104 to 7.49 × 104 at each speed condition, it confirms a significant difference in energy distribution. This indicates the presence of a pseudo-fault on one side of the wheelset. The positions of the healthy and defective sides can then be identified by incorporating the RMS and SPM indicators discussed in section “Vibration characteristics of axle-boxes on both sides under different outer ring defect widths and vehicle speeds”. Specifically, the side with larger RMS and SPM indicators corresponds to the real fault, while the other side represents the pseudo-fault. However, identifying pseudo-faults with small defects, such as a 1 mm defect, should be conducted when the vehicle operates at speeds below 40 km/h. Consequently, the reference range for the difference in VF indicators, along with the RMS and SPM indicators, serves as a criterion for identifying coaxial pseudo-faults caused by outer ring defects in axle-box bearings of wheelsets in urban rail vehicles. In real-world vehicle scenarios, the differences in VF indicators of the axle-box vibration responses on both sides of the wheelset, as shown in Figs. 1 and 8, are 2.65 × 104 and 1.43 × 104, respectively. This demonstrates that the proposed criterion range is reasonable.

Statistical features of spectral dispersion of the axle-box vibration on both sides of the wheelset: (a) Comparison of the VF indicator at different speeds without a bearing defect; (b) Comparison of the VF indicator at different speeds with a 1 mm bearing defect; (c) Comparison of the VF indicator at different speeds with a 3 mm bearing defect; (d) Comparison of the VF indicator at different speeds with a 5 mm bearing defect.
Conclusion
In this paper, a bearing-vehicle-track coupled dynamic model is established to study coaxial pseudo-fault vibration characteristics, which integrates a defective DTRB dynamic model and a vehicle-track coupled dynamic model that considers the flexibilities of the wheelset, axle-box, and bogie frame. Additionally, the proposed model is validated through field tests. Then, three outer ring defects with different widths are simulated across four operational speed conditions to investigate the coaxial pseudo-fault vibration characteristics of the axle-box bearings on both sides of the wheelset in urban rail vehicles. Based on the simulation results, the dynamic response and coaxial transmission characteristics of the axle-box with a defective DTRB on both sides of the wheelset were analyzed. The key conclusions are as follows:
-
(1)
When there is a fault in the axle-box bearing on one side of the wheelset, a pseudo-fault phenomenon occurs in the axle-box on the opposite side, except in the case of a 1 mm defect at 80 km/h. The coaxial pseudo-fault phenomenon is more pronounced with a defect width of 3 mm, compared to the 1 mm and 5 mm defect widths. The amplitude, RMS, and SPM indicators of the axle-box response on the defective side are greater than those on the healthy side, and all increase with defect width. Furthermore, the SPM indicator shows that the axle-box bearing on the healthy side is only diagnosed as normal when the defect width is 1 mm. Therefore, distinguishing between coaxial real and pseudo faults cannot rely solely on amplitude characteristics and quantitative indicators.
-
(2)
By comparing the dynamic responses of the axle-box bearings on both sides in the time and frequency domains, the impulse response transmitted to the healthy side consistently lags behind that generated by the defect on the defective side. The lag time is influenced by defect width and vehicle speed but stabilizes within approximately 0.0013 s when speeds exceed 60 km/h. Moreover, the fault frequency components and their harmonics in the spectrum and envelope spectrum of the healthy side are relatively dispersed, and the harmonic attenuation is rapid.
-
(3)
Compared to the time lag feature, spectral energy dispersion serves as a more intuitive and effective characteristic for identifying pseudo-faults. Accordingly, a criterion for distinguishing between the pseudo-fault and the real fault is proposed based on the difference in VF indicators of the axle-box vibration responses on both sides of the wheelset.
In future work, the proposed criteria and their indicator ranges should be further validated under real operating conditions of urban rail vehicles. Additionally, bidirectional vibrational characteristics considering faults on both sides of the axle-box bearings need to be examined. Moreover, the vibration characteristics of coaxial pseudo-faults caused by inner ring and roller defects will be further explored.
Data availability
All data generated or analyzed during this study are included in this published article.
References
Ding, J., Zhou, J. & Yin, Y. Fault detection and diagnosis of a wheelset-bearing system using a multi-Q-factor and multi-level tunable Q-factor wavelet transform. Measurement 143, 112–124 (2019).
Tang, D. Generalized Resonance, Resonance Demodulation Fault Diagnosis and Safety Engineering: Urban Rail Transit Section (China Railway Press, 2013).
Singh, D. S. & Zhao, Q. Pseudo-fault signal assisted EMD for fault detection and isolation in rotating machines. Mech. Syst. Signal Process. 81, 202–218 (2016).
Liu, Y., Yan, C., Kang, J., Wang, Z. & Wu, L. Investigation on characteristics of vibration interaction between supporting bearings in rotor-bearing system. Measurement 216, 113000 (2023).
Sahu, D., Dewangan, R. K. & Matharu, S. P. S. An investigation of fault detection techniques in rolling element bearing. J. Vib. Eng. Technol. 12, 5585–5608 (2024).
Wang, Z., Cheng, Y., Yang, B., Xiao, S. & Zhang, W. Raceway defect features of a high-speed train axle box bearing in the vehicle-track coupled system. IEEE Trans. Instrum. Meas. 72, 1–15 (2023).
Wang, B., Liu, Y., Yang, S., Liao, Y. & Wang, M. Characteristics analysis on bearing rotor system of high-speed train with track irregularity. Mech. Syst. Signal Process. 221, 111674 (2024).
Li, Y., Gao, Q., Li, P., Liu, J. & Zhu, Y. Fault diagnosis of rolling bearing using a refined composite multiscale weighted permutation entropy. J. Mech. Sci. Technol. 35, 1893–1907 (2021).
Pandiyan, M. & Babu, T. N. Systematic review on fault diagnosis on rolling-element bearing. J. Vib. Eng. Technol. https://doi.org/10.1007/s42417-024-01358-4 (2024).
Cao, H., Niu, L., Xi, S. & Chen, X. Mechanical model development of rolling bearing-rotor systems: A review. Mech. Syst. Signal Process. 102, 37–58 (2018).
Gong, X., Wu, K. & Ding, Q. Vibration analysis of axle box bearing considering the coupling effects of local defects and track irregularities. J. Vib. Eng. Technol. 11, 2467–2483 (2023).
Liu, J. & Shao, Y. A numerical investigation of effects of defect edge discontinuities on contact forces and vibrations for a defective roller bearing. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 230, 387–400 (2016).
Ma, Q., Liu, Y., Yang, S., Liao, Y. & Wang, B. A coupling model of high-speed train-axle box bearing and the vibration characteristics of bearing with defects under wheel rail excitation. Machines 10, 1024 (2022).
Liu, G., Zeng, J., Luo, R. & Gao, H. Vibration performance of high-speed vehicles with axle box bearing defects. J. Vib. Shock 35, 37–42+51 (2016).
Liu, J. & Shao, Y. Overview of dynamic modelling and analysis of rolling element bearings with localized and distributed faults. Nonlinear Dyn. 93, 1765–1798 (2018).
Chi, Y. et al. Spectral DCS-based feature extraction method for rolling element bearing pseudo-fault in rotor-bearing system. Measurement 132, 22–34 (2019).
Chi, Y., Yang, S., Jiao, W. & Liu, X. EMD-DCS based pseudo-fault feature identification method for rolling bearings. J. Vib. Shock 39, 9–16 (2020).
Liao, X. et al. Research on load characteristics of axle-box bearing raceway under wheel-rail excitation. Shock Vib. 2021, 1–13 (2021).
Liao, X. et al. A simulation investigation on the effect of wheel-polygonal wear on dynamic vibration characteristics of the axle-box system. Eng. Fail. Anal. 139, 106513 (2022).
Wang, Z. et al. Influence of wheel-polygonal wear on the dynamic forces within the axle-box bearing of a high-speed train. Veh. Syst. Dyn. 58, 1385–1406 (2020).
Luo, Y. et al. Dynamic response of the axle-box bearing of a high-speed train excited by wheel flat. Veh. Syst. Dyn. 62, 2260–2282 (2023).
Ma, Q., Yang, S., Liu, Y., Wang, B. & Liu, Z. Dynamic analysis of axle box bearings on the high-speed train caused by wheel-rail excitation. Appl. Math. Mech. 45, 441–460 (2024).
Ma, Q., Yang, S., Liu, Y. & Wang, B. Axle box bearings on the high-speed train: vibration characteristics analysis in the context of multi-source faults. Veh. Syst. Dyn. 62, 1990–2012 (2023).
Lu, Z., Wang, X., Yue, K., Wei, J. & Yang, Z. Coupling model and vibration simulations of railway vehicles and running gear bearings with multitype defects. Mech. Mach. Theory 157, 104215 (2021).
Wang, J. et al. A comparative study of the vibration characteristics of railway vehicle axlebox bearings with inner/outer race faults. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 235, 1035–1047 (2021).
Guo, L., Yu, Y., Chen, Z., Liu, Y. & Gao, H. Study on dynamic characteristics of urban rail transit vehicle considering faulty axle-box bearings under variable speeds. Mech. Syst. Signal Process. 206, 110849 (2024).
Yang, C. et al. Analysis of load and life of EMU axle box bearing considering wheel polygonization evolution. J. Vib. Eng. 36, 1146–1155 (2023).
Huo, J. et al. The rigid–flexible coupling dynamic model and response analysis of bearing–wheel–rail system under track irregularity. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 232, 3859–3880 (2018).
Guan, T., Deng, X. & Wang, J. Dynamic response of axle box bearing for high-speed train considering wheelset flexibility and polygonal wear. Sci. Rep. 13, 22680 (2023).
Liao, X. et al. A simulation investigation on the influence of bearing outer ring defect on dynamic vibration characteristics of the axle-box system. Adv. Theory Simul. 7, 2300650 (2024).
Yu, Y., Guo, L. & Gao, H. A study on the effect of wheel-polygonal wear on dynamic vibration characteristics of urban rail vehicle axle-box bearings. in 2023 Prognostics and Health Management Conference (PHM) 159–163. https://doi.org/10.1109/PHM58589.2023.00039 (2023).
Li, Q., Chen, L., Xu, J., Chen, G. & Yang, G. Failure modes of rolling bearings for high-speed emus and prospects for countermeasures. Bearing 1–8 (2024).
Luo, J. & Luo, T. Rolling Element Bearing Analysis, Calculate and Application (China Machine Press, 2009).
Nelias, D., Bercea, I. & Paleu, V. Prediction of roller skewing in tapered roller bearings. Tribol. Trans. 51, 128–139 (2008).
Tang, W., He, W., Han, L. & Xu, S. Research on Dynamic Monitoring System of High-Speed Train Bearing (Science Press, 2022).
Luo, Y., Yang, B. & Tu, W. Dynamic modeling of the contact between cage and rolling element in rolling bearing and contact characteristics. J. Aerosp. Power 37, 2887–2895 (2022).
Liu, X. Dynamics Analysis Model of High-Speed Rolling Bearings and Dynamic Performance of Cages (Dalian University of Technology, 2011).
Cha, H.-Y., Choi, J., Ryu, H. S. & Choi, J. H. Stick-slip algorithm in a tangential contact force model for multi-body system dynamics. J. Mech. Sci. Technol. 25, 1687–1694 (2011).
Guyan, R. J. Reduction of stiffness and mass matrices. AIAA J. 3, 380–380 (1965).
Ning, J. & Liu, Y. Diagnosis method of rolling element bearing fault based on EMD. J. Detect. Control 39, 91–95 (2017).
Yang, J. et al. Rolling Bearing Diagnosis: Practical On-site Technology (China Machine Press, 2015).
Acknowledgements
This research work was partly supported by the Natural Science Foundation of Sichuan Province (grant number 2024NSFSC0019), the National Natural Science Foundation of China (grant numbers 51875481 and 52388102) and China Postdoctoral Science Foundation (grant number 2020M682506).
Author information
Authors and Affiliations
Contributions
W.Z., J.D., X.L, W.L. conceived and investigated the study. J.D., W.L. supervised and provided funding for the study. W.Z., X.L. wrote the paper. All authors analyzed, discussed the results and reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Appendix of nomenclature
Appendix of nomenclature
Symbols | Descriptions | Symbols | Descriptions |
|---|---|---|---|
REB | Rolling element bearing | DTRB | Double-row tapered roller bearings |
DCRB | Double-row cylindrical roller bearings | i | Subscript for the number of wheelsets |
j | Subscript for the number of DTRB rows | k | Subscript for the number of each roller in a row |
N | Count of single-row rollers in DTRB | (L, R) | Subscript for the left and right sides of the urban rail vehicle |
\({\varphi _{\text{r}\left( {\text{L},\text{R}} \right)ijk}}\) | The azimuth angle of the k-th roller | \(\delta _{{\text{r}\left( {\text{L},\text{R}} \right)ijk}}^{\text{o}}\), \(\delta _{{\text{r}\left( {\text{L},\text{R}} \right)ijk}}^{\text{i}}\) | The relative radial displacement between the roller and outer, inner ring |
\(\delta _{{\text{a}\left( {\text{L},\text{R}} \right)ijk}}^{\text{o}}\), \(\delta _{{\text{a}\left( {\text{L},\text{R}} \right)ijk}}^{\text{i}}\) | The relative axial displacement between the roller and outer, inner ring | \(\delta _{{\text{n}\left( {\text{L},\text{R}} \right)ijk}}^{\text{o}}\), \(\delta _{{\text{n}\left( {\text{L},\text{R}} \right)ijk}}^{\text{i}}\), \(\delta _{{\text{n}\left( {\text{L},\text{R}} \right)ijk}}^{\text{a}}\) | The elastic deformation between the roller and the outer ring raceway, between the roller and the inner ring raceway, as well as between the rollers and the ribs of the inner ring |
\({\alpha _\text{o}}\), \({\alpha _\text{i}}\), \({\alpha ^{\prime}_\text{f}}\) | The contact angle of the roller-outer ring raceway, roller-inner ring raceway, and roller-inner ring guiding rib | \({\alpha _\text{f}}\), \({\alpha _\text{c}}\) | The inner ring guiding rib angle, the pressing slope angle of the cage pocket |
\({h_{\varphi \text{r}\left( {\text{L},\text{R}} \right)ijk}}\) | The initial clearance of the DTRB | \({h_\text{o}}\) | The additional clearance caused by the bearing defect |
\({u_\text{r}}\), \({u_\text{a}}\) | The bearing radial and axial clearance | \({\theta _\text{o}}\),\({\tau _\text{o}}\) | The initial offset angle between the outer ring defect and the first roller, the angle corresponding to the outer ring defect |
L, W, H | The length, width, and depth of bearing defect | A, \({r_\text{b}}\) | The maximum value of clearance variation, the radius of the roller |
\({\omega _\text{c}}\), \({\omega _\text{w}}\) | The rotation angular velocity of the cage and the wheelset | \({X_{\text{a}\text{b}(\text{L},\text{R})i}}\),\({Y_{\text{a}\text{b}(\text{L},\text{R})i}}\),\({Z_{\text{a}\text{b}(\text{L},\text{R})i}}\) | The longitudinal, lateral and vertical displacements of the axle-box about X/Y/Z-axis |
\({X_{\text{w}i}}\), \({Y_{\text{w}i}}\), \({Z_{\text{w}i}}\) | The longitudinal, lateral and vertical displacements of the wheelset about X/Y/Z-axis. | \({\alpha _{\text{w}i}}\),\({\gamma _{\text{w}i}}\) | The roll and yaw angles of the wheelset about X/Z-axis |
\({d_\text{w}}\) | The lateral semi-span of primary suspensions | \({X_{\text{r}(\text{L},\text{R})ijk}}\),\({Y_{\text{r}(\text{L},\text{R})ijk}}\),\({Z_{\text{r}(\text{L},\text{R})ijk}}\) | The displacements of the roller about X/Y/Z-axis |
\({\alpha _{\text{r}(\text{L},\text{R})ijk}}\), \({\beta _{\text{r}(\text{L},\text{R})ijk}}\), \({\gamma _{\text{r}(\text{L},\text{R})ijk}}\) | The rotation angles of the roller about X/Y/Z-axis | \({M_\text{r}}\) | The mass of the roller |
\({J_{\text{r}x}}\), \({J_{\text{r}y}}\), \({J_{\text{r}z}}\) | The mass moment of inertia of the roller about X/Y/Z-axis | \({X_{{\text{c}}(\text{L},\text{R})ij}}\),\({Y_{{\text{c}}(\text{L},\text{R})ij}}\),\({Z_{{\text{c}}(\text{L},\text{R})ij}}\) | The displacements of the cage about X/Y/Z-axis |
\({\alpha _{\text{c}(\text{L},\text{R})ij}}\), \({\beta _{{\text{c}}(\text{L},\text{R})ij}}\), \({\gamma _{{\text{c}}(\text{L},\text{R})ij}}\) | The rotation angles of the cage about X/Y/Z-axis | \({M_\text{c}}\) | The mass of the cage |
\({J_{\text{c}x}}\), \({J_{\text{c}y}}\), \({J_{\text{c}z}}\) | The mass moment of inertia of the cage about the X/Y/Z-axis | \(Q_{{\text{r}\left( {\text{L},\text{R}} \right)ijk}}^{{\text{o}(\text{i})}}\), \(Q_{{\text{a}\left( {\text{L},\text{R}} \right)ijk}}^{\text{i}}\) | The contact force between the roller and outer (inner) ring raceways, as well as between the roller and the guiding rib |
\({Q_{\text{c}\text{r}(\text{L},\text{R})ijk}}\) | The contact force between the roller and the cage crossbeam | \({K_{\text{r}\text{o}(\text{i})}}\),\({K_\text{a}}\), \({K_{\text{c}\text{r}}}\) | The equivalent contact stiffness of the roller-raceway, the roller-rib and the roller-cage |
\({C_{\text{r}\text{o}(\text{i})}}\), \({C_\text{a}}\), \({C_{\text{c}\text{r}}}\) | The equivalent contact damping of the roller-raceway, the roller-rib and the roller-cage | \({c_i}\) | Index related to contact angle |
\({\delta ^ * }\), \(\sum \rho\) | The coefficient dependent on contact geometry, the curvature sum | \(E^{\prime}\),\({E_\text{r}}\),\({E_\text{c}}\) | The equivalent elastic modulus, and the elastic modulus of the roller and the cage |
\({\varepsilon _\text{r}}\), \({\varepsilon _\text{c}}\) | Poisson’s ratio of the roller and the cage | \(f_{{\text{r}\left( {\text{L},\text{R}} \right)ijk}}^{{\text{o}(\text{i})}}\),\(f_{{\text{r}\left( {\text{L},\text{R}} \right)ijk}}^{{\text{o}(\text{i})\text{a}}}\) | The tangential and axial frictions between the roller and the outer (inner) ring raceway |
\(f_{{\text{a}\left( {\text{L},\text{R}} \right)ijk}}^{\text{i}}\) | The tangential friction between the roller and the inner ring rib | \({f_{\text{c}\text{r}\left( {\text{L},\text{R}} \right)ijk}}\), \(f_{{\text{c}\text{r}\left( {\text{L},\text{R}} \right)ijk}}^{\text{a}}\) | The tangential and axial frictions between the roller and the cage crossbeam |
\({D_\text{m}}\), \({D_\text{b}}\), \({D_\text{o}}\), \(D\) | The pitch diameter of bearing, the average diameter of tapered roller, the outer ring raceway diameter, the bearing inside diameter | \({L_\text{e}}\),\({L_\text{b}}\) | The effective contact length of the roller, the roller length |
\({h_\text{r}}\) | The contact point height of the roller-rib | \(F_{x}^{{\text{o}(\text{i})}}\), \(F_{y}^{{\text{o}(\text{i})}}\), \(F_{z}^{{\text{o}(\text{i})}}\) | The resultant forces acting on the axle-box (the outer ring) and the wheelset (the inner ring) in longitudinal, lateral, and vertical directions about X/Y/Z-axis |
\(\lambda\) | A switching value to determine the inner or outer ring | \(SV\) | The quantification value of fault impacts |
\({n_\text{b}}\) | The rotational speed of the bearing | \({f_\text{o}}\) | The outer ring fault characteristic frequency |
\({f_\text{r}}\) | Rotational frequency of the wheelset | SPM | The shock pulse method |
RMS | The root mean square | dB | The decibel value |
IMFs | The intrinsic mode functions | EMD | The empirical mode decomposition |
VF | The frequency variance | FC | The frequency center |
\(S\left( f \right)\) | The power spectral density function of signal | f | Signal frequency |
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhao, W., Ding, J., Liao, X. et al. Investigation on coaxial pseudo-fault characteristics induced by the outer ring defect in the single-sided axle-box bearing of wheelset in urban rail vehicles. Sci Rep 15, 10693 (2025). https://doi.org/10.1038/s41598-025-93857-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-93857-x
