
Abstract
Ancient murals are precious cultural heritages. Due to the influence of environmental and human factors, many murals have been damaged to varying degrees. It is an urgent problem for field experts to effectively protect and restore these murals’ original appearance. However, most existing mural restoration works require an automatic and accurate detection technique of the damaged mural regions. In this paper, we propose a damage detection network for ancient murals based on multi-scale boundary and region feature fusion (MBRF). Our proposed network contains two main sub-networks: global information generator (GIG) and detail information generator (DIG). These two sub-networks are, respectively, used for global feature integration and detail feature refinement. In the global feature integration stage, GIG can predict the coarse contents for the damaged mural regions and generate a global mask map. In the feature refinement stage, DIG utilizes the coarse contents of the global mask map to enhance the detailed features and generate the refined feature maps. We design a global decoder that can efficiently fuse multi-level semantic information. Moreover, we introduce a reverse attention (RA) module to capture boundary details. We also propose a bilateral guided fusion (BGF) module to extract and integrate boundary and region features. We conduct experiments on the Mogao Grottoes murals of Dunhuang and the ethnic minority murals in Yunnan. Experimental results show that our proposed network can accurately detect the damaged regions in ancient murals, and outperforms existing detection approaches in terms of subjective visual quality and objective evaluation metrics. The Dice coefficients on the two datasets have reached 0.9173 and 0.7633, respectively, both significantly higher than other comparison approaches.
Similar content being viewed by others


Introduction
Ancient murals are precious human cultural heritages, which record a wealth of historical memory information of human life, religion, culture, and art activities1. Due to long-time exposure to environments and human activities, most of these ancient murals have suffered from various damages and degradations such as cracks, scratches, flaking, and other diseases2. These diseases may greatly reduce the cultural and artistic values of ancient murals. Therefore, automatic and accurate detection of damaged regions in murals has become a critical and urgent work for cultural heritage protection communities. At present, most researchers rely on manual methods to calibrate damaged and diseased areas in murals, which is extremely time-consuming and labor-intensive3. The use of modern computer technology for automatic detection of mural disease areas can greatly reduce the workload of mural restoration personnel.
In recent years, researchers have made preliminary progress in the field of automatic detection of ancient mural damages. Turakhia et al.4 utilized order-statistic filtering and tensor voting to automatically detect crack regions and used them as inputs for Canny edge detection for crack repair. Wu et al.5 used two morphological methods (top-hat and below-hat) to design multi-scale structural elements to mark the diseases of Tang Dynasty tomb murals. Jaidilert et al.6 proposed a semi-automatic detection method based on seed region growing for cracks in Thai murals. This method requires users to provide seed points, which complicates the prediction process of mural-damaged areas. Cao et al.7 proposed an improved region-growing algorithm for the murals of the Song Dynasty in the Kaihua Temple. The method cannot accurately calibrate the flaking regions with significant variations in color and brightness. Zhang et al.8 applied RGF filtering in murals to smooth image details and preserve their edges. This processing method is more suitable for murals with obvious differences between damaged and intact areas. Zhang et al.9 used a local optimal hierarchical clustering extraction algorithm to form an information mask for mural diseases. The approach requires manual intervention. However, the abovementioned methods either have low accuracy or suffer from high computational complexity. There still exist limitations and challenges when dealing with complex image environments.
With the advancement of deep learning technology, some researchers have begun to make preliminary attempts to use deep learning approaches to detect mural damage. Lin et al.10 used the minimum noise fraction transform and trained a back propagation neural network to classify damaged and normal areas in mural images. Huang et al.11 designed a multi-path convolutional neural network (CNN) to detect mural damage. which is applicable to damaged images under different lighting conditions. Yu et al.12 proposed a model based on U-Net to detect paint-peeling diseases in temple murals. Wu et al.13 proposed a lightweight YOLOv5-based detection model to improve the detection performance. Cao et al.14 combined the lightweight network MobileNetV2 with PSPNet to improve segmentation accuracy and, meanwhile, reduce computation time. Hu et al.15 proposed a new hierarchical multi-scale encoder–decoder framework that uses an attention-convolution dual-branch module to predict damaged areas in complex background murals. Wu et al.16 proposed a dual-attention detection network based on ConvNeXt for accurately identifying cracks in tomb murals.
Although the above techniques are capable of detecting specific mural damages, there still exist some challenges for a mural damage detection approach. Firstly, many ancient murals contain diverse contents and complex structures. This makes it very difficult for an approach to accurately detect the damaged regions of murals. Secondly, some murals have significant differences in the area of damage. This will pose difficulties for algorithms that simultaneously detect large-scale damage and small holes. Thirdly, most deep neural networks need large amounts of training data. The quality of the training datasets will affect the performance of a damage detection model.
To address these challenges, we propose an innovative network that has a great ability to detect damaged regions of murals, even though the murals contain complex structures and abundant semantic contents. The main contributions of this paper include the following four points: (1) We design a damage detection model for ancient murals based on multi-scale boundary and region feature fusion (MBRF). The model contains two sub-networks: global information generator (GIG) and detail information generator (DIG). The GIG integrates global features to predict coarse-damaged regions, whereas the DIG utilizes the predicted coarse-damage regions to generate a refined map of the damaged regions of murals. (2) We employ the Res2Net residual convolutions to extract multi-level features and design a global decoder (GD) to integrate multi-level deep features. (3) We propose a bilateral guided fusion (BGF) module to extract and fuse the boundary and the region features. We introduce a reverse attention (RA) module to capture boundary details, and we design a group receptive field (GRF) module to extract the region features. (4) For network training, we collect 100 high-quality images of damaged murals, and expand them to 5000 by use of data augmentation techniques.
Proposed method
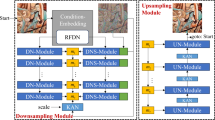
Most of the damaged regions in ancient murals have irregular shapes and complex backgrounds. It is very difficult to detect the damaged regions of the mural images. Regions and their boundaries are crucial features for detecting mural damage. Therefore, the extraction of these features plays an important role in guiding the detection of damaged murals. Motivated by this point, we propose a multi-scale boundary and region feature fusion (MBRF) model for detecting damaged ancient murals. Figure 1 illustrates the overall architecture of the MBRF model. The model can be divided into two sub-networks: global information generator (GIG) and detail information generator (DIG). Two sub-networks collaborate to optimize the features from coarse to fine.

The overall architecture of the proposed model.
Given an input-damaged mural image \(I\in {{\mathbb{R}}}^{H\times W\times C}\), the GIG extracts different levels of features from image I, and integrates the three deep-level features using a global decoder (GD). The GD focuses on predicting the coarse locations of damaged mural regions and then generates a global mask map Mg. We use the global mask map and three deep-level features as inputs to DIG. DIG refines features under the guidance of Mg. It gradually extracts fuzzy boundary details and region features and then generates refined feature maps at different scales. The last feature map is processed through a sigmoid function to generate a final prediction map.
Global information generator (GIG)
The high-level features in the network have high resolution. These features contain rich semantic information and can preliminarily predict the damaged regions in ancient murals. We design a global information generation network, also referred to as the global information generator (GIG) in this work, to predict the coarse position of the damaged regions. Given an input image \(I\in {{\mathbb{R}}}^{512\times 512\times 3}\), GIG generates a mask map containing global information. GIG consists of the Res2net residual blocks17 and a global decoder. We use residual blocks as input layers to extract features at four levels \(\left\{{F}_{i}| 1\le i\le 4\right\}\) of the input image. Compared with ordinary convolution, residual convolution blocks increase the receptive field of the convolutional layer and, therefore, can improve the ability to extract global and local information.
Notice that the context of ancient murals is complex, and the multi-level features extracted from the early input layers of the network are insufficient for damage detection. Directly fusing these features can easily lead to information loss. Therefore, we propose a global decoder (GD) to capture the global context information as much as possible. Figure 2a illustrates the architecture of the GD, we take, \({F}_{2}\in {{\mathbb{R}}}^{64\times 64\times 512}\), \({F}_{3}\in {{\mathbb{R}}}^{32\times 32\times 1024}\) and \({F}_{4}\in {{\mathbb{R}}}^{16\times 16\times 2048}\) as the input features of GD. The GD module is divided into the following three main parts:

a GD module, b residual convolution (RC) module, c multi-resolution fusion (MRF) module, and d pooling fusion (PF) module.
(a) Residual convolution (RC) module (Fig. 2b). The module connects two residual blocks by residual concatenation18. Each residual block consists of a Grouped Normalization layer19, a Gelu activation function20 and a 3 × 3 convolutional layer. The RC unifies the channels of each input feature to 64.
(b) Multi-resolution fusion (MRF) module (Fig. 2c). This module employs 3 × 3 convolution with different dilation factors21 to extract multi-resolution features and concatenate these features across channel dimensions. This module effectively expands the receptive field and further improves the ability to extract features.
(c) Pooling fusion (PF) module (Fig. 2d). In order to match the features (extracted by MRF) at different scales, we perform a convolution operation on these features to obtain \({F}_{c}^{2}\in {{\mathbb{R}}}^{64\times 64\times 64}\), \({F}_{c}^{3}\in {{\mathbb{R}}}^{32\times 32\times 64}\), and \({F}_{c}^{4}\in {{\mathbb{R}}}^{16\times 16\times 64}\). The intermediate output features \({F}_{a}\in {{\mathbb{R}}}^{32\times 32\times 64}\) and \({F}_{b}\in {{\mathbb{R}}}^{16\times 16\times 64}\) are defined as
where \({f}_{1\times 1}\left(\cdot \right)\) denotes the convolution operation with a kernel size of 1 × 1, ⊕ denotes element-wise addition, ⊗denotes matrix multiplication, \({\rm{P}}\left(\cdot \right)\) denotes the pooling operation. Afterwards, we obtain the output feature FPF by using \({F}_{{\rm{PF}}}={\rm{P}}({F}_{a})\oplus {f}_{1\times 1}\left({F}_{b}\right)\), and let them pass a 3 × 3 convolution to form the global mask map \({M}_{g}\in {{\mathbb{R}}}^{16\times 16\times 1}\).
Detail information generator (DIG)
The goal of the sub-network DIG is to generate detailed information of damaged murals based on the predicted global mask map Mg. DIG mainly consists of three cascaded bilateral guided fusion (BGF) modules (combined with residual connections) to achieve feature optimization from coarse to fine. This process can be formulated as \({M}_{{\rm{out}}}={f}_{1\times 1}\left({\rm{BGF}}(F,{M}_{{\rm{in}}})\oplus {M}_{{\rm{in}}}\right)\), where \({\rm{BGF}}\left(\cdot \right)\) denotes the BGF module. Under the guidance of Mg, through the iterative process of three BGF modules, the GIG can predict three refined feature maps \({M}_{{\rm{out1}}}\in {{\mathbb{R}}}^{16\times 16\times 1}\), \({M}_{{\rm{out2}}}\in {{\mathbb{R}}}^{32\times 32\times 1}\), and \({M}_{{\rm{out3}}}\in {{\mathbb{R}}}^{64\times 64\times 1}\). Mout3 is passed through the sigmoid activation function to generate a final damage prediction map. The details of the GIG network are shown in Fig. 1.
The BGF modules build the connections between damaged regions and boundary information. Figure 3 illustrates the architecture of the BGF module. We up-sample Min to obtain a feature map Mup with the same size as F, and then use Mup to process F in two branches. One branch is used to focus on the detailed features of the damaged boundary. The other branch is used to enhance the features of the damaged region.

The architecture of the bilateral guided fusion (BGF) module and the detail of the RA module.
The global mask map Mg comes from the early layers of the network and can only capture the coarse locations of damaged regions without fine features. Feature maps generate blurry boundaries during damage detection. To solve this problem, we introduce the reverse attention (RA) module22. In the first branch to capture the boundary detail information. Figure 3 shows the details of the RA module. After the up-sampled feature map passes through a sigmoid function and a reverse operation, we can obtain a reverse attention map \({M}_{{\rm{RA}}}\in {{\mathbb{R}}}^{H\times W\times 1}\), which erases the already identified damaged region. The reverse attention map is defined as
where \(\sigma \left(\cdot \right)\) denotes the sigmoid activation function. Then, we use the formula \({F}_{{\rm{RA}}}=F\otimes \varepsilon \left({M}_{{\rm{RA}}}\right)\) to calculate a reverse attention weight \({F}_{{\rm{RA}}}\in {{\mathbb{R}}}^{H\times W\times C}\), where \(\varepsilon \left(\cdot \right)\) denotes the expansion operation, which expands the single channel of the same channel MRA to the same channel as F. By calculating this weight, the network can focus on detecting previously ignored regions, thereby extracting boundary and fine features from complementary regions.
The RA module effectively improves the problem of boundary blurring, but it is prone to losing contextual information outside the boundary. Inspired by the receptive field block 23, we designed a grouped receptive field module (GRF) in the second branch to enhance the ability of region feature extraction. Figure 4 illustrates the architecture of the GRF. We split the input feature F along the channel into four groups by using \({F}_{\rm{s}}^{i}={\rm{Split}}\,{({f}_{1\,\times\,1})(F)}{({i}=1,2,3,4)}\) to reduce the computational complexity. \({\rm{Split}}\left(\cdot \right)\) denotes the spilt operation. In the four groups, we set the convolutions with different kernel sizes and dilation factors to expand the receptive field of the module. The features of neighboring groups are fused by element-wise addition. In this way, multi-scale information between different levels can complement each other to capture richer semantic information. Next, the GRF module calculates the output feature by using the following formula:
where \({\rm{C}}\left(\cdot \right)\) denotes the concatenate operation. Through the two-branch processing, the model simultaneously extracts boundary detail features Mline and region enhancement features Fregion, obtaining a comprehensive representation of the damaged regions. The above operations can be expressed as
where \(f\left(\cdot \right)\) is the convolution operation. Finally, we perform a matrix addition operation on Mregion and Fregion to obtain the refined feature FBGF. Through this gradual erasing and optimization strategy, the model can establish the relationship between regions and boundaries, and obtain accurate and refined damage detection results.

The architecture of the group receptive (GRF) field module.
Loss function
In this paper, we employ deep supervision24 to compute the loss function. Our loss function is described as
where \({L}_{{\rm{iou}}}^{\omega }\) and \({L}_{{\rm{bce}}}^{\omega }\) denote the weighted IoU loss25 and the weighted binary cross entropy (BCE)26 loss, respectively.
Given an input image I, we compute the loss function for the feature maps Mg, Mout1, Mout2, Mout3, and Mout4 generated at four different stages of the network. These feature maps are up-sampled to make their resolution the same as the size of the ground truth G. The overall loss function of the network can be expressed as
where λi and λg denote the weights for different stages. In our experiment, λ1, λ2, and λ3 are set to 1, 0.3, and 0.2, respectively, λg is set to 0.1.
Experimental results and analysis
To verify the detection performance of the proposed model, we conduct experiments on real damaged ancient murals. Since mural damage detection is inherently an image segmentation problem, we compare the proposed model with four segmentation approaches: U-Net27, EGE-UNet28, M2SNet29, and PraNet30. For a fair comparison, all approaches are trained on the same mural image dataset. We evaluate the mural detection results using four objective metrics: Dice coefficient(Dice)31, Precision (Pre)32, Recall (Re)32, and Mean Absolute Error (MAE)33. We also perform ablation experiments for each module of the proposed model.
Training settings
The experiments are implemented using the PyTorch framework and run on the Windows platform. The hardware environment is configured with NVIDIA GeForce RTX 2080Ti GPU. In the training process, the size of each mural image is 512 × 512 pixels, and we use the Adam optimizer. The initial learning rate is set to 1.0 × 10−3. All experiments are conducted under consistent conditions.
Dataset
Due to the limitation of available mural data, we have to use mural data as much as possible for network training to ensure its performance. In this study, we build a dataset called DHMural, which contains 100 mural images from the Mogao Grottoes of Dunhuang (366–1368). This dataset contains ancient mural images from different dynasties and styles. To alleviate the over-fitting problem, we expand the training samples using data augmentation techniques34, including random rotation, mirror flipping, and crop. Through data augmentation, we expand the training samples to form a dataset of 5000 mural images. In the experiment, we divide the dataset into a training set and a validation set in a ratio of 8:2 (4000 images for training and 1000 images for validation). To test the performance of the network, we select 324 representative mural images that are independent of the training set.
To assess the generalization ability of the proposed model, we collect 345 mural images of ethnic minority in Yunnan, and create a corresponding data set called YNMural. This dataset includes murals images from the Zhilin Temple in Honghe and the Baisha Ancient Town in Lijiang. Note that the YNMural dataset have different painting styles and historical backgrounds with the DHMural murals.
The two mural datasets are manually annotated by mural disease researchers as ground truth images. Each image contains varying numbers, shapes, and sizes of damaged regions. All mural images are resized to 512 × 512 pixels.
Experiment on DHMural dataset
In this subsection, we test our model over the DHMural dataset. Figure 5 shows six images with varying degrees of damage and the detection results of all five comparative approaches. It can be seen that the 1st and 2nd images have some small damaged regions which are difficult to distinguish from the backgrounds. Our model can successfully detect these damaged regions. For the 3rd and 4th images with continuous large damage regions, our model not only finds the damaged regions but also can accurately detect the boundaries of the damaged regions. The 5th and 6th images have cluttered damaged regions. They are somewhat challenging tasks. It can be seen that the detection results of our model show more resemblance with the Ground Truth images than the other four comparative approaches.

Detection results of five approaches on the DHMural dataset.
We also provide a quantitative comparison by use of Dice, Pre, Re, and MAE on the detection results of all test mural images. The larger the value of Dice, Pre and Re, the better the detection result. The smaller the value of MAE, the better the result. Table 1 shows the quantitative evaluation metrics of five approaches on the DHmural dataset. It can be seen that our model outperforms other four approaches in all four evaluation metrics.
Experiment on YNMural dataset
In this test, we perform our model over the YNMural dataset. This dataset has different painting styles and historical backgrounds with the DHMural. Figure 6 gives five mural images and the damage detection results of five comparative approaches. The 1st, 2nd, and 3rd images have simple backgrounds and obvious damaged regions. Our model can not only detect large-scale damaged regions but also obtain clear and continuous boundaries. The 4th and 5th images have lots of cluttered damaged regions. In these difficult tasks, our model can find most of the damaged regions. Table 2 shows the objective evaluation metrics of five approaches on the YNMural dataset. It can be seen that our model achieved better evaluation metrics than the other two comparison approaches. In this test, our model shows good generalization ability when detecting various types of damaged murals.

Detection results of five approaches on the YNMural dataset.
Ablation study
In this subsection, we perform ablation experiments on the proposed core modules to verify their impact on the detection results. We take the Res2net residual blocks as the baseline network (referred to as Baseline). We respectively add the proposed global decoder (GD) and the bilateral guided fusion (BGF) module to the baseline and abbreviate these two operations as Baseline+GD and Baseline+BGF. We add the introduced reverse attention (RA) module to the baseline and abbreviate this operation as Baseline+RA.
Figure 7 gives five test mural images and a visual comparison of the ablation experiment results for four different models. It can be seen that the Baseline model performs poorly in this test. It fails to detect small damaged regions. The Baseline+GD model can suppress the interference of background information, reduce information loss, and improve the detection performance of damaged regions. The Baseline+RA model refines the boundaries of damaged regions and enhances attention to detail information. However, this model ignores contextual information outside the boundaries, resulting in inaccurate regional localization. On the basis of the RA module, the Baseline+BGF model incorporates the grouped receptive field (GRF) module to enhance the extraction of regional features. It can be seen that this model makes up for the shortcomings of the RA module, and can simultaneously capture local detail features and global regional features. By comparison, our complete model (MBRF) can detect more complete regions and generate continuous boundaries by integrating the advantages of each module. The model shows the best visual effects in this test.

Results of the ablation experiment.
Table 3 shows the objective evaluation metrics of five test models. As compared with the Baseline network, the detection results for each proposed module show obvious improvement in Dice, Pre, and Re metrics. The MAE values of each module are lower (better) than the baseline network. This shows that each proposed module plays an important role in mural damage detection.
Conclusion
In this study, we propose a multi-scale boundary and region feature fusion (MBRF) model for damage detection in ancient murals. This model is a two-stage network consisting of a global information generator (GIG) and a detail information generator (DIG). The GIG is designed to capture global information and thus can predict a global mask map of damaged mural regions. DIG can accurately detect completely damaged regions under the guidance of the global mask map predicted by GIG. Our model is tested on the DHMural and the YNMural datasets. Experimental results show that the model can accurately detect various types of damaged regions in ancient murals. Compared with the baseline network, the proposed MBRF model improves the Dice coefficient by 5.2 percentage points and 6.2 percentage points, respectively. The model also achieves better results in visual effects and objective evaluation metrics as compared to the other four existing approaches.
Because the styles of ancient murals in various parts of China are different, there are many kinds of diseases, and their characteristics are very different. This paper takes the collected murals in the Mogao Grottoes of Dunhuang and the ethnic minority murals in Yunnan as the research objects. Due to the limited amount of ancient mural data, although data augmentation techniques are used to make up for the lack of training data sets, these expanded data have information redundancy. This may affect the performance and generalization ability of the network model to a certain extent. Moreover, the lack of high-quality data limits the model’s ability to detect damaged murals of different styles, and the robustness of the model needs to be further improved. This research work provides a new idea and reference for intelligent detection of ancient mural disease areas in various places in China and all over the world. It is a new attempt and exploration to automatically detect ancient mural disease areas using deep learning methods. In future work, we will continue to explore the latest developments in deep neural networks and enhance the learning ability of the model. At the same time, we need to continuously expand the ancient mural dataset of different styles, and design a more adaptable mural damage detection model.
Data availability
No datasets were generated or analysed during the current study.
Abbreviations
- RA:
-
Reverse attention
- GD:
-
Global decoder
- BGF module:
-
Bilateral guided fusion module
References
Cao, J., Zhang, Z., Zhao, A., Cui, H. & Zhang, Q. Ancient mural restoration based on a modified generative adversarial network. Herit. Sci. 8, 1–14 (2020).
Cheng, Y. & Xu, Z. Restoration of damaged mural images based on recurrent feature inference and global–local attention. In 2023 IEEE International Conference on Image Processing and Computer Applications (ICIPCA) (ed. Mukherjee P.D.) 115–120 (IEEE, 2023).
Fu, X., Han, Y., Sun, Z., Ma, X. & Xu, Y. Line-drawing enhanced interactive mural restoration for Dunhuang Mogao Grottoes. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 4, 99–106 (2017).
Turakhia, N., Shah, R. & Joshi, M. Automatic crack detection in heritage site images for image inpainting. In Proc. Eighth Indian Conference on Computer Vision, Graphics and Image Processing (ed Mukherjee D. P.) 1–8 (Association for Computing Machinery, 2012).
Wu, M., Wang, H. & Li, W. Research on multi-scale detection and image inpainting of Tang dynasty tomb murals (in Chinese). Comput. Eng. Sci. 52, 169–174 (2016).
Jaidilert, S. & Farooque, G. Crack detection and images inpainting method for Thai mural painting images. In 2018 IEEE 3rd International Conference on Image, Vision and Computing (ICIVC) 143–148 (IEEE, 2018).
Cao, J., Li, Y., Cui, H. & Zhang, Q. Improved region growing algorithm for the calibration of flaking deterioration in ancient temple murals. Herit. Sci. 6, 67 (2018).
Hao-yuan, Z., Dan, X., Hai-ni, L. & Bing, Y. Multi-scale mural restoration method based on edge reconstruction (in Chinese). J. Graph. 42, 590 (2021).
Zhang, Z., Shui, W., Zhou, M., Xu, B. & Zhou, H. Research on disease extraction and inpainting algorithm of digital grotto murals (in Chinese). Appl. Res. Comput. 38, 2495–24982504 (2021).
Lin, Y., Xu, C. & Lyu, S. Disease regions recognition on mural hyperspectral images combined by MNF and BP neural network. J. Phys.: Conf. Ser. 1325, 012095 (2019).
Huang, R., Feng, W., Fan, M., Guo, Q. & Sun, J. Learning multi-path cnn for mural deterioration detection. J. Ambient Intell. Humaniz. Comput. 11, 3101–3108 (2020).
Yu, K. et al. Intelligent labeling of areas of wall painting with paint loss disease based on multi-scale detail injection u-net. In Optics for Arts, Architecture, and Archaeology VIII (eds Liang, H., Groves, R.) Vol. 11784, 37–44 (SPIE, 2021).
Wu, L., Zhang, L., Shi, J., Zhang, Y. & Wan, J. Damage detection of grotto murals based on lightweight neural network. Comput. Electr. Eng. 102, 108237 (2022).
Cao, J., Tian, X., Chen, Z., Rajamanickam, L. & Jia, Y. Ancient mural segmentation based on a deep separable convolution network. Herit. Sci. 10, 11 (2022).
Hu, N., Wu, H. & Yuan, G. Prediction of broken areas in murals based on MLP-fused long-range semantics. Herit. Sci. 11, 161 (2023).
Wu, M., Chai, R., Zhang, Y. & Lu, Z. Dadnet: dual-attention detection network for crack segmentation on tomb murals. Herit. Sci. 12, 369 (2024).
Gao, S.-H. et al. Res2net: a new multi-scale backbone architecture. IEEE Trans. Pattern Anal. Mach. Intell. 43, 652–662 (2019).
He, K., Zhang, X., Ren, S. & Sun, J. Deep residual learning for image recognition. In Proc. IEEE Conference on Computer Vision and Pattern Recognition 770–778 (IEEE, 2016).
Wu, Y. & He, K. Group normalization. In Proc. European Conference on Computer Vision (ECCV) (eds Ferrari V., Hebert, M., Sminchisescu C., Weiss, Y.) 3–19 (Springer International Publishing, 2018).
Hendrycks, D. & Gimpel, K. Gaussian error linear units (gelus). arXiv preprint arXiv:1606.08415 (2016).
Yu, F. & Koltun, V. Multi-scale Context Aggregation by Dilated Convolutions. CoRR abs/1511.07122 (2015).
Chen, S., Tan, X., Wang, B. & Hu, X. Reverse attention for salient object detection. In Proc. European Conference on Computer Vision (ECCV) (eds Ferrari V., Hebert, M. Sminchisescu C. Weiss Y.) 234–250 (Springer, 2018).
Liu, S. & Huang, D. Receptive field block net for accurate and fast object detection. In Proc. European Conference on Computer Vision (ECCV) (eds Ferrari V., Hebert, M. Sminchisescu C. Weiss Y.) 385–400 (Springer, 2018).
Lee, C.-Y., Xie, S., Gallagher, P., Zhang, Z. & Tu, Z. Deeply-supervised nets. In Artificial Intelligence and Statistics (ed Lawrence, N.) 562–570 (PMLR, 2015).
Zheng, Z. et al. Distance-iou loss: Faster and better learning for bounding box regression. In Proc. AAAI Conference on Artificial Intelligence (Gundersen, O. E.) Vol. 34, 12993–13000 (Association for Computing Machinery, 2020).
De Boer, P.-T., Kroese, D. P., Mannor, S. & Rubinstein, R. Y. A tutorial on the cross-entropy method. Ann. Oper. Res. 134, 19–67 (2005).
Ronneberger, O., Fischer, P. & Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-assisted Intervention—MICCAI 2015: 18th International Conference, Munich, Germany, October 5–9, 2015, Proceedings, Part III 18 (eds Navab, N., Hornegger, J., Wells, W.M., Frangi, A. F.) 234–241 (Springer, 2015).
Ruan, J., Xie, M., Gao, J., Liu, T. & Fu, Y. Ege-unet: an efficient group enhanced unet for skin lesion segmentation. In International Conference on Medical Image Computing and Computer-assisted Intervention (eds Greenspan, H., Madabhushi, A., Mousavi, P., Salcudean, S.E., Duncan, J., Syeda-Mahmood, T., Taylor, R.) 481–490 (Springer, 2023).
Zhao, X. et al. M2snet: Multi-scale in multi-scale subtraction network for medical image segmentation. arXiv preprint arXiv:2303.10894 (2023).
Fan, D.-P. et al. Pranet: Parallel reverse attention network for polyp segmentation. In International Conference on Medical Image Computing and Computer-assisted Intervention 263–273 (eds Martel, A.L., Abolmaesumi, P., Stoyanov, D., Mateus, D., Zuluaga, M.A., Zhou, K.S., Racoceanu, D., Joskowicz, L.) (Springer, 2020).
Crum, W. R., Camara, O. & Hill, D. L. Generalized overlap measures for evaluation and validation in medical image analysis. IEEE Trans. Med. imaging 25, 1451–1461 (2006).
Lever, J., Krzywinski, M. & Altman, N. Points of significance: classification evaluation. Nat. Methods 13, 603–604 (2016).
Borji, A., Cheng, M.-M., Jiang, H. & Li, J. Salient object detection: a benchmark. IEEE Trans. Image Process. 24, 5706–5722 (2015).
Ma, Y., Tang, P., Zhao, L. & Zhang, Z. Review of data augmentation for image in deep learning (in Chinese). Image Graph. 26, 487–502 (2021).
Acknowledgements
This research was supported by the National Natural Science Foundation of China (Grant Nos. 62166048 and 61263048), and by the Applied Basic Research Project of Yunnan Province (Grant No. 2018FB102).
Author information
Authors and Affiliations
Contributions
All authors listed have made a substantial, direct, and intellectual contribution to the work and approved it for publication.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Wu, X., Yu, Y. & Li, Y. A damage detection network for ancient murals via multi-scale boundary and region feature fusion. npj Herit. Sci. 13, 82 (2025). https://doi.org/10.1038/s40494-025-01546-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s40494-025-01546-9
