
Abstract
The spin angular momentum (SAM) plays a significant role in light-matter interactions. It is well known that light carrying SAM can exert optical torques on micro-objects and drive rotations, but 3D rotation around an arbitrary axis remains challenging. Here, we demonstrate full control of the 3D optical torque acting on a trapped microparticle by tailoring the vectorial SAM transfer. To this end, we construct a theoretical relationship between the 3D SAM vector of a tightly focused field and the local polarization helicity of the incident field. In practice, a single-beam configuration is proposed for dynamic 3D SAM manipulation, facilitating time-varying vectorial SAM transfer to particles. Control of 3D optical torque on birefringent microparticles is validated by simulations, and dynamic 3D rotations of optically trapped particles around arbitrary axes are experimentally demonstrated. Our work paves the way for manipulating 3D optical torque and particle spinning, which is expected to boost new functionalities and applications of optical tweezers.
Similar content being viewed by others


Introduction
Light is able to exert forces and torques on matter by the transfer of photon momentum1,2,3,4,5, which forms the basis of optical tweezers4,6,7,8,9,10. Optical force generated by the linear momentum transfer has been exploited for particle pushing4,5 or pulling11,12, optical trapping4,6, and optical cooling7,9. Optical torque, the angular analog of optical force, results from the transfer of optical angular momentum (AM)13, which includes spin angular momentum (SAM) and orbital angular momentum14,15. Both of them can induce optical rotations16,17, adding new degrees of freedom to manipulation of microscale and nanoscale objects16,18. The ability to exert optical torque holds great potential for various applications in biotechnology. For example, the ‘optical torque wrench’ is able to twist a single DNA molecule19, allowing investigation of new mechanical properties of the biomolecules20. Optical torque also offers a particular way to orient biological samples to facilitate full-angle optical tomography21,22. In addition, optical torque can be used to drive micromachines and micropumps23. Such a noncontact light-induced rotation of microscopic object is expected to benefit optical sensing24,25, microrheology26, and microfluidics27.
Practical approaches for applying optical torque and particle spinning have been developed since the discovery of optical tweezers. A straightforward way to rotate an object is to grasp it with multiple optical traps that can be moved around each other28. Rotation can also be realized by a dual beam fiber optical trap by rotating structured modes in fibers29. Recently, tomographic moulds have been proposed to manipulate arbitrarily shaped objects and control their rotations30. In fact, these methods rely on rotating the trapping beams. By contrast, the transfer of AM via absorption or scattering offers a fundamental way to exert a torque31,32. As such, controlled rotations can be realized with a single motionless light beam. However, the induced optical torque is always oriented along the direction of beam propagation14,33, although the direction of the torque could be opposite to that of the incident AM (left-handed optical torque)34. It was recently discovered that the SAM could be oriented perpendicular to the beam direction, leading to so-called transverse spins (T-spins)35,36,37,38. Afterwards, transverse rotation of the microparticles was realized by the transfer of T-spins from an interference field of orthogonal circularly polarized beams39 (Fig. 1a). However, dynamic control of the rotation axis with arbitrary three-dimensional (3D) orientations has not yet been achieved, due to the difficulties in manipulating 3D optical torque.

a Transverse spin (T-spin) by two-wave interference (classic). The superposition of the left-hand and right-hand circularly polarized beams (LCP and RCP) leads to a T-spin (yellow arrow), which can be transferred to particles to drive transverse rotation (red arrow). b Time-varying 3D SAM control via a single-beam configuration (our work). The incident beam is 45° linearly polarized (LP), and its x-polarized component is shaped with asymptotic spiral phases to manipulate various SAM vectors (yellow arrows). The spiral phase masks labeled t1, t2, and t3 correspond to a sequence of phase masks at times t1, t2, and t3, resulting in SAM1, SAM2, and SAM3, respectively. c Dynamic 3D optical spanner via time-varying vectorial transfer of the SAM to microparticles in an optical trap. Experimental images of a spinning cubic calcite particle demonstrate controlled rotations around an arbitrary axis in 3D space. The rotation axes are defined by the corresponding SAM1, SAM2, and SAM3 in (b).
In this work, we demonstrate control of 3D optical torque on birefringent microparticles and dynamic 3D rotations around an arbitrary axis by the vectorial transfer of SAM to the particles. To this end, we construct a theoretical formula that relates the 3D SAM vector of a tightly focused field to the local polarization helicity of the incident field. This quantity allows us to arbitrarily tune the orientation of the SAM vector and thus fully control the 3D optical torques acting on the particles. Practically, we propose a single-beam configuration for dynamic 3D SAM manipulation in the tightly focused field, as illustrated in Fig. 1b. In this configuration, the incident beam is 45° linearly polarized rather than circularly polarized, and its x-polarized component is shaped with the so-called asymptotic spiral phase to tailor arbitrary SAM vectors. In comparison to T-spin by two-wave interference40 (Fig. 1a), our design makes the leap from “two for one” to “one for more” when controlling the SAM vector. As such, the desired 3D rotations around an arbitrary axis can be implemented with a single-beam trap. Experimentally, birefringent cubic calcite microparticles were made to demonstrate the concept of a dynamic 3D optical spanner (Fig. 1c). Our work provides new perspectives for light-induced torque and 3D rotation of microscopic objects with great potential in optomechanical and microfluidic applications25,27,41.
Results
3D SAM control via a single focused beam
The SAM is a fundamental dynamical property of light waves that manifests the specific vector character of the electromagnetic field. In classical electromagnetism, the electric-biased spin density for a monochromatic field is defined as14,42
where ε0 is the permittivity in vacuum, ω0 is the angular frequency of the field, and \({\overset{\rightharpoonup}{{{\bf{E}}}^{*}}}\) denotes the complex conjugate of the electric field \({\overset{\rightharpoonup}{{{\bf{E}}}}}\). To manipulate the SAM transfer to microparticles held in optical tweezers, tight focusing with a high-numerical-aperture (NA) lens is used. As illustrated in Fig. 2a, focusing rotates the wavevector (\({\overset{\rightharpoonup}{{{\bf{k}}}}}\)) of the incoming collimated beam and yields a conical \({\overset{\rightharpoonup}{{{\bf{k}}}^{\prime}}}\)-distribution, which is characterized by the converging angle θ of the focusing system with \(\sin {\theta }_{\max }={NA}\). According to the Debye–Wolf theory43, the focused field (\(\overset{\rightharpoonup}{{{\bf{E}}}^{\prime}}\)) is related to the incident field (\({\overset{\rightharpoonup}{{{\bf{E}}}}}\)) via a 3D rotational transformation. As such, the three components of the refracted field \(\left({E}_{x}^{\prime},{E}_{y}^{\prime},{E}_{z}^{\prime}\right)\) are
where \(\left(\rho,\phi \right)=\left(f\sin \theta,\phi \right)\) represent the polar coordinates in the incident plane, and f is the focal length of the aplanatic lens. \(P\left(\theta \right)=\sqrt{\cos \theta }\) is the apodization function of the focusing system. \(({E}_{\rho },{E}_{\phi })\) are radially and azimuthally polarized components of the incident field. This is accompanied by rotations of the local polarization vectors that are locked and orthogonal to each \(\overset{\rightharpoonup}{{{\bf{k}}}^{\prime}}\). As a result, the local spin density changes after refraction, which reads

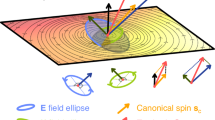
a Controlling the direction of the SAM vector (\(\overset{\rightharpoonup }{{{\bf{S}}}_{{{\rm{all}}}}^{{\prime} }}\), yellow arrow) by tailoring the azimuthal distribution of the incident polarization helicity, \({S}_{\phi }\left(\phi \right)\), as indicated by Eq. (5). Focusing with a lens rotates the wavevector (\({\overset{\rightharpoonup}{{{\bf{k}}}}}\), red arrows) of a collimated beam (locally treated as geometrical rays) and yields a conical \(\overset{\rightharpoonup}{{{\bf{k}}}^{\prime}}\)-distribution in the focused field. The local spins (\(\overset{\rightharpoonup}{{{\bf{S}}}^{\prime}}\), purple arrows) that are attached to each \(\overset{\rightharpoonup}{{{\bf{k}}}^{\prime}}\) also rotates. As such, the total SAM vector will be the vector sum of all the local spins. Thus, the total SAM vector is determined by the transverse local polarization helicity of the incident field. (b–e) Typical 3D SAM vectors obtained by tailoring the designed polarization helicity. The desired 3D SAM vectors are indicated by the yellow arrows, and the local spins for \(\overset{\rightharpoonup}{{{\bf{S}}}^{\prime}_{{{\bf{x}}}}}\), \(\overset{\rightharpoonup}{{{\bf{S}}}^{\prime}_{{{\bf{y}}}}}\), \(\overset{\rightharpoonup}{{{\bf{S}}}^{\prime}_{{{\bf{z}}}}}\), and \({\overset{\rightharpoonup}{{{{\bf{S}}}^{\prime}}}}({60}^{\circ },\,{135}^{\circ })\) are represented by the purple, blue, green, and red vectors, respectively.
In contrast to incident plane-wave or Gaussian-beam states, which exhibit only a longitudinal component Sz, the spin density of tightly focused fields can have both longitudinal and transverse components14,44. In particular, the 3D SAM vector of the focused field is determined by the transverse local polarization helicity of the incident field.
To manipulate the 3D SAM in tightly focused fields, we consider the situation of separate variables for the local spin density of the incident field,
By substituting the form in Eq. (4) into Eq. (3) and after the integral in terms of θ, we obtain
where \(\left({S}_{x}^{{\prime} },{S}_{y}^{{\prime} },{S}_{z}^{{\prime} }\right)\) are the three components of the total SAM density vector after refraction. \(a={\int }_{\!0}^{{\theta }_{\max }}-\cos \left(\theta \right){\sin }^{2}\left(\theta \right){S}_{\theta }\left(\theta \right)d\theta\), \(b={\int }_{\!0}^{{\theta }_{\max }}{\cos }^{2}\left(\theta \right)\sin \left(\theta \right){S}_{\theta }\left(\theta \right)d\theta\), and \({\theta }_{\max }={\sin }^{-1}\left({NA}\right)\). This quantity suggests that the total SAM density vector can be controlled by tailoring the azimuthal distribution of the polarization helicity of the incident field. In a 3D orientation space, the vector \({\overset{\rightharpoonup}{{{\bf{S}}}^{\prime}}}\) can be expressed as \({\overset{\rightharpoonup}{{{\bf{S}}}^{\prime}}}\left(\Theta,\Phi \right)=S^{\prime} {\overset{\rightharpoonup}{{{\bf{e}}}}}\left(\Theta,\Phi \right)\), where \({\overset{\rightharpoonup}{{{\bf{e}}}}}\left(\Theta,\Phi \right)\) denotes the unit vector with Θ and Φ as the parameters describing the direction of the SAM vector. Accordingly, we can obtain the polarization helicity of the incident field in the form of
This equation can be used to designate the orientation of the SAM vector. Figure 2b–e present examples of the designed SAM vectors with various orientations, where the total SAM density is expressed as the vector sum of the local spin density vectors. Apart from the pure T-spins, a 3D SAM with arbitrary orientations is achieved via a single-beam configuration. In comparison to the T-spin by two-wave interference39,40, our scheme of manipulating the SAM makes the leap from “two for one” to “one for more”. The ability to control 3D SAM vector with an arbitrary orientation lays the foundation for vectorial SAM transfer to microparticles.
To generate the specific distribution of polarization helicity described by Eq. (6), we propose constructing a light field in the form of
where A(ρ) is the amplitude of the field, c is the normalization factor given by \(1/{c}^{2}={\left(\frac{\sin \Theta }{-{{\rm{\pi }}}a}\right)}^{2}+{\left(\frac{\cos \Theta }{2{{\rm{\pi }}}b}\right)}^{2}\), and i is the imaginary unit. In addition to the desired distribution of polarization helicity, such a field guarantees the same power for the x- and y-polarized components. More importantly, its practical realization requires shaping only the phase distribution of the x component, which reads
where Arg(∙) denotes the operator used to calculate the phase of the complex field. Its phase profile resembles the well-known spiral phase, and we term it the asymptotic spiral phase (Supplementary Fig. 1). The experimental generation of such a field can be readily implemented by a polarization-sensitive spatial light modulator (SLM) that is illuminated with a 45° linearly polarized collimated beam, as illustrated in Fig. 3a. Equation (8) describes the phases to be programmed onto the SLM, with Φ and Θ as the parameters which program the rotation axis. For example, the spiral phase masks labeled t1, t2, and t3 in Fig. 1b, which are projected sequentially on the SLM at times t1, t2, and t3, can result in SAM1, SAM2, and SAM3 and the corresponding rotations in Fig. 1c.

a Illustration of the single-beam configuration for vectorial SAM transfer. A 45° LP beam incidents on an SLM. The wavefront of the x-polarized component is modulated as dictated by the phase on the SLM, while the y-component remains a uniform plane wave. Their superposition creates the light field given by Eq. (7). b Phase profile for generating a T-spin along the x-axis. c, d Intensity and SAM density distributions of the individual field components for the T-spin beam. e–g Simulation results corresponding to the SAM about an oblique axis of (60°, 45°). h, i 3D orientation plot of the calculated torques acting on a spinning birefringent spherical particle with the SAM vector in the transverse or oblique (60°, 45°) direction, respectively. The insert shows the orientations of the torque and the SAM vector in the spherical coordinate system.
Simulation of 3D optical spin torque
To demonstrate the control of the 3D optical torque, we used the vectorial Debye diffraction integral to calculate the tightly focused fields (see Supplementary Note for details) and the SAM density for the incident fields given by Eq. (7). As an example, we studied a T-spin light beam with the total SAM vector along the x-axis. Figure 3b shows the phase mask to generate the T-spin beam, and the corresponding calculation results are presented in Fig. 3c, d. As expected, the field exhibits a pure T-spin in the x-component. Although SAM distributions exist in the y- and z-components, the total values are zero. Distinguished from the fringe-patterned T-spin by two-wave interference (Supplementary Fig. 2), the SAM density obtained by our scheme is more concentrated. For further examination, we calculated the total intensity (sum of the three components) of this field and its distribution can be seen in Supplementary Fig. 3. Such a tightly focused beam, resembling the standard Gaussian beam, inherently offers large gradient forces to create a 3D optical trap. Apart from the T-spins, one example of the SAM vector along an arbitrary oblique axis is demonstrated in Fig. 3e, f, g. This focused beam has a total SAM along the axis with altitude and azimuth angles of (60°, 45°). A particle subjected to the application of optical torque from the SAM transfer tends to rotate in the same direction as the angular momentum. As such, the particles trapped by such spinning light are expected to undergo rotation around an axis with arbitrary orientations.
Birefringent particles are usually used for SAM transfer in optical traps. They approximately act as waveplates, and experience birefringence-induced torques determined by the polarization of the trapping beam. To investigate the controllable 3D spin torque, we performed simulations to calculate the reaction torques exerted on birefringent microparticles via the T-matrix model39,45. In the simulation, a 3.6-μm birefringent microsphere with its optical axis aligned with the beam was stably trapped at a fixed axial ___location. Optical torques on the spinning particle were computed using the optical tweezers toolbox46. Figure 3h, i plots the time-varying 3D orientations of the calculated torques corresponding to the SAM density in Fig. 3d, g. More simulation results in terms of various SAM vectors are shown in Supplementary Fig. 4. We find that the direction of the torque is slightly different from that of the total SAM vector because it depends on both the shape of the particle and the polarization distribution of the trapping beam. Moreover, the optical torque acting on the particle is not a constant since it varies with the orientation of the particle. Nevertheless, the SAM transfer to the birefringent particle provides persistent torques that can induce continuous rotation. In particular, the direction of the 3D spin torque can be tuned at will by the vectorial transfer of the SAM, which is expected to control the rotation axis in 3D particle spinning.
Experimental demonstration of a dynamic 3D spanner
To achieve controlled transfer of 3D SAM to birefringent microparticles, we adopted a single-beam configuration with reconfigurable ability by using an SLM to generate the light field given by Eq. (7). The optical trapping apparatus is illustrated in Supplementary Fig. 5, and a detailed description of the experimental apparatus is presented in the Methods section. Once different asymptotic spiral phase patterns are projected and switched on the SLM, the corresponding focused beam with a vectorial SAM creates an optical trap that can induce spinning along the desired 3D axis. In our experiment, birefringent calcite particles, a kind of calcium carbonate crystal, were synthetized (Methods) for vectorial SAM transfer since their size and shape can be precisely controlled47,48,49. For direct observation of the 3D rotation, we synthesized micrometer-sized calcite in cubic form rather than in spherical form for the spinning experiment, where the calcite particles were dispersed in water solution at reasonable concentrations.
Figure 4 demonstrates the experimental observation of dynamic multi-axis spinning of a cubic calcite particle in an optical trap, where the inserts help to visualize the orientations of the cube at different moments during spinning. First, a focused beam with pure T-spins and longitudinal spin was generated successively by shaping the asymptotic spiral phase of the incident beam. A cubic calcite particle with a size of ~5 μm was trapped by the beam, and at the same time we observed the spinning of the cube in the trap. Supplementary Movie 1 provides a visualization of the cubic particle undergoing rotation around the x, y and z axes, and typical frames are shown in Fig. 4a–c. It was nearly rotated in the same direction as the designed SAM vector; in particular, the multi-axis rotation was switched by only the phase patterns on the SLM. Furthermore, we demonstrated the rotation of a trapped calcite around an oblique axis (135°, 180°). To identify the orientations of the particle during rotation, we specially adhered a cilium to the particle, as depicted in the images in Fig. 4d. The cilium is located on the focal plane on the top of the image. Along with the spinning calcite, the cilium moves through the focal plane and goes to the upper right corner; then, it goes behind the calcite particle and cannot be viewed. After a small gap in time, the cilium appears again on the focal plane but beneath the particle; afterwards, moving toward the left lower corner takes place, and it becomes defocusing. In contrast, the cilium remains to be viewed throughout rotation when the z-axis rotation is switched. The whole process of such an inclined-axis rotation in comparison to the beam-axis rotation is shown in Supplementary Movie 2.

a–c Video frames showing a cubic particle in an optical trap undergoing controlled rotation around the x, y and z axes, respectively. Switching between these rotation axes is implemented by refreshing the corresponding phase patterns on the SLM. The inserts illustrate the orientations of the spinning cube at different moments during rotation. The whole spinning process can be visualized in Supplementary Movie 1. d Demonstration of an oblique-axis (135°, 180°) rotation of a calcite particle with a tail for further identification of the orientations. Supplementary Movie 2 provides the recorded video.
Notably, an optical spanner around a time-varying 3D axis is achievable with our single-beam configuration. By dynamically controlling the SAM vector of the focused field, the time-varying transfer of SAM to optically trapped calcite can occur, accompanied by controllable rotation around a varying axis. Supplementary Movie 3 shows the spinning movement of a cubic calcite particle around an axis that itself is revolving. Compared to fixed-axis rotation, identifying the orientations of a spinning cube at every moment is more difficult because of such complicated movements. For further examination, we provided an animation as a reference in Supplementary Movie 3 to predict such a rotation. Overall, the cubic particle moves in accordance with the expected predictions. These results confirm that application of time-varying 3D optical spin torque on birefringent microparticles is achieved with our method as well as dynamic 3D spanners.
Discussion
In the experiments described above, controlled 3D rotations were demonstrated using homemade birefringent calcite microparticles. In fact, birefringence has been observed not only in anisotropic crystals but also in biological cells50,51. This led us to believe that birefringent cells could also be good prospects for the vectorial transfer of SAM and the resultant 3D rotations are expected to be possible. For such an investigation, we employed the proposed spinning light field to trap single living cells of Prunus cerasifera that possess birefringence. As expected, the cell rotated in the optical trap due to the transfer of SAM from the trapping light, as demonstrated in Supplementary Fig. 6. We achieved spinning of individual cells in water solution around multiple axes including an axis orthogonal to the beam direction (Supplementary Fig. 6a and Supplementary Movie 4) and an oblique axis (Supplementary Fig. 6b and Supplementary Movie 5). The ability to control the rotation axis in spinning of individual cells is particularly useful for single-cell 3D imaging.
In our technique, a single focused beam provides both the restoring force and the torque for trapping and rotation simultaneously. It is well-known that a high-NA objective is usually required for a single-beam optical trap6. Similarly, the axial stability of our optical traps largely depends on the objective NA (Supplementary Fig. 7a). Furthermore, we find that the SAM transfer in the optical trap can be modulated by the NA. For a certain incident beam, the amount of the SAM in the focal field varies with the NA due to the spin-to-orbit conversion44,52. As a result, the maximum longitudinal SAM decreases but the transverse SAM increases with the NA, as demonstrated in Supplementary Fig. 7b. To apply an arbitrary 3D spin torque, the longitudinal and transverse SAM components should be of the comparable magnitude. That suggests a high NA is required for application of arbitrary torques. In spite of the same NA and optical power, there also exist differences in the optical traps for applying different torques because of the non-uniform intensity distributions in the focal field (Supplementary Fig. 8).
Note that not all kinds of birefringent particles can spin in the optical trap, which is determined by the optical torque acting on them. The optical torque includes both the alignment torque and spinning torque, which are closely related to the size, shape and especially the symmetry of the particle32,53. The alignment torque causes the particle to acquire an equilibrium orientation, while the spinning torque tends to drive its rotation. As such, the final effects depend on the counterbalance against each other. The particle rotates continuously only if the maximum alignment torque is less than the spinning torque. In this situation, the optical torque changes with the particle orientation and is time-varying. As a result, the rotation speed changes during spinning, which can be clearly observed in the videos showing the rotation of cells (Supplementary Movies 4–5). However, if the spinning torque cannot compete with the alignment torque, the particle will acquire an equilibrium orientation in the optical trap under the action of the two torques. In particular, reorientation can be controlled through changes in the spinning torque by modulating the SAM of the trapping laser. Further complexity to this problem is introduced when the birefringence microparticles possess asymmetric structures. In this case, time-varying torques should be known to predict the complex movements of the particle. Regardless of the circumstances, our ability to perform time-varying vectorial transfer of SAM can be advantageous for the controlled 3D rotation of microparticles in an optical trap.
In summary, we have demonstrated dynamic 3D spinning of birefringent microparticles in an optical trap by the time-varying vectorial transfer of SAM to the particles. 3D optical torques acting on birefringent particles are controlled by manipulating the SAM vector of the tightly focused field. To facilitate dynamic 3D SAM control, we proposed a design for an incident field that can be generated with an SLM by manipulating the so-called asymptotic spiral phase. As a result of the proposed design, controllable 3D rotations of microparticles can be implemented using a single-beam optical trap. To validate the concept of a 3D spanner with arbitrary orientations, simulations are performed to prove the capability of controlling the 3D SAM vector as well as the application of 3D optical torques on birefringent microparticles. Experimentally, 3D optical spanners have been demonstrated using cubic calcite microparticles, and dynamic switching between multiple rotation axes has been achieved. Furthermore, controlled 3D rotation of individual living cells was also demonstrated with our optical spanner.
These achievements represent a significant step in manipulating 3D optical torques on microparticles. Furthermore, our method enhanced the capability of light-controlled 3D rotation with great potential in various applications, such as volumetric imaging21,54, optical sensing24,25, microrheology26, light-driven micromachines23 and microfluidics27. Apart from birefringent particles, 3D rotation of absorptive objects is also achievable by our scheme since the angular momentum can be transferred through not only scattering but also absorption31. Our 3D optical spanners can be further exploited to manipulate both the rotation and translation of micro-objects, which is expected to boost new functionalities and applications of optical tweezers.
Methods
Experimental apparatus
As a result of the proposed design, the light fields given by Eq. (7) can be generated by illuminating an SLM with a 45° linearly polarized beam (Fig. 3a). Thus, 3D trapping and rotation of microparticles can be implemented using a standard setup of holographic optical tweezers. Our optical tweezer system was constructed based on an inverted microscope (IX73, Olympus), as sketched in Supplementary Fig. 5. A 532-nm continuous-wave solid-state laser (MSL-R-532-5W, Changchun New Industries, Ltd.) serves as the coherent light source and emits a linearly polarized beam. After expansion with a lens pair (L1 and L2), the collimated beam is then steered to fully illuminate the surface of a liquid crystal SLM (1920 × 1080-pixel resolution; Pluto, HOLOEYE). A half-wave plate is inserted before the SLM to tune the incident polarization and ensure a polarization angle of 45°. Due to the polarization sensitivity of the SLM, only the phase of the x-polarized component of the incident field can be modulated and the y-polarized component remains unchanged. When different asymptotic spiral phase patterns are displayed and switched by the SLM, the linearly polarized incident beam is converted into the light fields with the desired polarization helicity. The modulated light field is relayed to the pupil plane of an oil-immersion objective lens (100×, NA = 1.3; UPLFLN100XO2, Olympus). Finally, an optical trap created by the focused beam can confine and rotate the birefringent microparticles in a sealed sample cell. In addition, real-time observation of the movements of the trapped particles is performed with the microscope and a CMOS camera (PL-D752MU, PixeLINK).
Synthesis of cubic calcite microparticles
Cubic calcium carbonate (CaCO3) particles were synthesized following the procedures reported in ref. 49. In brief, a solution of Na2CO3 (0.25 M, 1.28 mL) was introduced into an aqueous solution of polyacrylic acid (PAA, Shanghai Macklin Biochemical Technology, Ltd.) with a molecular weight of 450 kD (80 mL,1.0 mg/mL), and the pH of the resulting solution was adjusted to 9.0 by adding NaOH. Subsequently, a solution of CaCl2 (0.25 M, 1.28 mL) was rapidly added to the pH-adjusted solution under vigorous stirring. This gave a final CaCO3 concentration of 8 mM. The resultant mixture was stirred for 1.0 min, and the solution was covered and allowed to stand under static conditions for 24 h at 80 °C to obtain the desired microparticles in cubic form.
Data availability
Data supporting the findings of this study are available within the article and its supplementary information files. All raw data generated during the current study are available from the corresponding authors upon request.
References
Poynting, J. H. & Strutt, J. W. XV. On the transfer of energy in the electromagnetic field. Philos. Trans. R. Soc. 175, 343–361 (1884).
Nichols, E. F. & Hull, G. F. A preliminary communication on the pressure of heat and light radiation. Phys. Rev. (Ser. I) 13, 307–320 (1901).
Beth, R. A. Mechanical detection and measurement of the angular momentum of light. Phys. Rev. 50, 115–125 (1936).
Ashkin, A. Acceleration and trapping of particles by radiation pressure. Phys. Rev. Lett. 24, 156–159 (1970).
Ashkin, A. Applications of laser radiation pressure. Science 210, 1081–1088 (1980).
Ashkin, A., Dziedzic, J. M., Bjorkholm, J. E. & Chu, S. Observation of a single-beam gradient force optical trap for dielectric particles. Opt. Lett. 11, 288–290 (1986).
Chu, S., Bjorkholm, J. E., Ashkin, A. & Cable, A. Experimental observation of optically trapped atoms. Phys. Rev. Lett. 57, 314–317 (1986).
Ashkin, A., Dziedzic, J. M. & Yamane, T. Optical trapping and manipulation of single cells using infrared laser beams. Nature 330, 769–771 (1987).
Ashkin, A. Optical trapping and manipulation of neutral particles using lasers. Proc. Natl. Acad. Sci. USA 94, 4853–4860 (1997).
Ashkin, A. & Dziedzic, J. M. Optical trapping and manipulation of viruses and bacteria. Science 235, 1517–1520 (1987).
Dogariu, A., Sukhov, S. & Sáenz, J. Optically induced ‘negative forces. Nat. Photonics 7, 24–27 (2013).
Chen, J., Ng, J., Lin, Z. & Chan, C. T. Optical pulling force. Nat. Photonics 5, 531–534 (2011).
Nieto-Vesperinas, M. Optical torque: electromagnetic spin and orbital-angular-momentum conservation laws and their significance. Phys. Rev. A 92, 043843 (2015).
Bliokh, K. Y. & Nori, F. Transverse and longitudinal angular momenta of light. Phys. Rep. 592, 1–38 (2015).
Chong, A., Wan, C., Chen, J. & Zhan, Q. Generation of spatiotemporal optical vortices with controllable transverse orbital angular momentum. Nat. Photonics 14, 350–354 (2020).
Padgett, M. & Bowman, R. Tweezers with a twist. Nat. Photonics 5, 343–348 (2011).
Ahn, J. et al. Optically levitated nanodumbbell torsion balance and GHz nanomechanical rotor. Phys. Rev. Lett. 121, 033603 (2018).
Grier, D. G. A revolution in optical manipulation. Nature 424, 810–816 (2003).
La Porta, A. & Wang, M. D. Optical torque wrench: angular trapping, rotation, and torque detection of quartz microparticles. Phys. Rev. Lett. 92, 190801 (2004).
Fazal, F. M. & Block, S. M. Optical tweezers study life under tension. Nat. Photonics 5, 318–321 (2011).
Lee, M., Kim, K., Oh, J. & Park, Y. Isotropically resolved label-free tomographic imaging based on tomographic moulds for optical trapping. Light Sci. Appl. 10, 102 (2021).
Sun, J., Yang, B., Koukourakis, N., Guck, J. & Czarske, J. W. AI-driven projection tomography with multicore fibre-optic cell rotation. Nat. Commun. 15, 147 (2024).
Būtaitė, U. G. et al. Indirect optical trapping using light driven micro-rotors for reconfigurable hydrodynamic manipulation. Nat. Commun. 10, 1215 (2019).
Stoev, I. D., Seelbinder, B., Erben, E., Maghelli, N. & Kreysing, M. Highly sensitive force measurements in an optically generated, harmonic hydrodynamic trap. eLight 1, 7 (2021).
Ahn, J. et al. Ultrasensitive torque detection with an optically levitated nanorotor. Nat. Nanotechnol. 15, 89–93 (2020).
Tassieri, M. Microrheology with optical tweezers: peaks & troughs. Curr. Opin. Colloid Interface Sci. 43, 39–51 (2019).
Baigl, D. Photo-actuation of liquids for light-driven microfluidics: state of the art and perspectives. Lab Chip 12, 3637–3653 (2012).
Bingelyte, V., Leach, J., Courtial, J. & Padgett, M. J. Optically controlled three-dimensional rotation of microscopic objects. Appl. Phys. Lett. 82, 829–831 (2003).
Kreysing, M. et al. Dynamic operation of optical fibres beyond the single-mode regime facilitates the orientation of biological cells. Nat. Commun. 5, 5481 (2014).
Kim, K. & Park, Y. Tomographic active optical trapping of arbitrarily shaped objects by exploiting 3D refractive index maps. Nat. Commun. 8, 15340 (2017).
He, H., Friese, M. E. J., Heckenberg, N. R. & Rubinsztein-Dunlop, H. Direct observation of transfer of angular momentum to absorptive particles from a laser beam with a phase singularity. Phys. Rev. Lett. 75, 826–829 (1995).
Friese, M. E. J., Nieminen, T. A., Heckenberg, N. R. & Rubinsztein-Dunlop, H. Optical alignment and spinning of laser-trapped microscopic particles. Nature 394, 348–350 (1998).
O’Neil, A. T., MacVicar, I., Allen, L. & Padgett, M. J. Intrinsic and extrinsic nature of the orbital angular momentum of a light beam. Phys. Rev. Lett. 88, 053601 (2002).
Hakobyan, D. & Brasselet, E. Left-handed optical radiation torque. Nat. Photonics 8, 610–614 (2014).
Aiello, A., Banzer, P., Neugebauer, M. & Leuchs, G. From transverse angular momentum to photonic wheels. Nat. Photonics 9, 789–795 (2015).
Wu, Y. et al. Time-varying optical spin-orbit interactions in tight focusing of self-torqued beams. J. Lightwave Technol. 41, 2252–2258 (2023).
Banzer, P. et al. The photonic wheel—demonstration of a state of light with purely transverse angular momentum. J. Eur. Optical Soc. Rapid Publ. 8, 13032 (2013).
Peng, L. et al. Transverse photon spin of bulk electromagnetic waves in bianisotropic media. Nat. Photonics 13, 878–882 (2019).
Stilgoe, A. B., Nieminen, T. A. & Rubinsztein-Dunlop, H. Controlled transfer of transverse orbital angular momentum to optically trapped birefringent microparticles. Nat. Photonics 16, 346–351 (2022).
Bekshaev, A. Y., Bliokh, K. Y. & Nori, F. Transverse spin and momentum in two-wave interference. Phys. Rev. X 5, 011039 (2015).
El Ketara, M., Kobayashi, H. & Brasselet, E. Sensitive vectorial optomechanical footprint of light in soft condensed matter. Nat. Photonics 15, 121–124 (2021).
Bliokh, K. Y., Dressel, J. & Nori, F. Conservation of the spin and orbital angular momenta in electromagnetism. N. J. Phys. 16, 093037 (2014).
Richards, B., Wolf, E. & Gabor, D. Electromagnetic diffraction in optical systems, II. Structure of the image field in an aplanatic system. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 253, 358–379 (1959).
Bliokh, K. Y., Rodríguez-Fortuño, F. J., Nori, F. & Zayats, A. V. Spin–orbit interactions of light. Nat. Photonics 9, 796–808 (2015).
Loke, V. L. Y., Nieminen, T. A., Heckenberg, N. R. & Rubinsztein-Dunlop, H. T.- Matrix calculation via discrete dipole approximation, point matching and exploiting symmetry. J. Quant. Spectrosc. Radiat. Transf. 110, 1460–1471 (2009).
Nieminen, T. A. et al. Optical tweezers computational toolbox. J. Opt. A Pure Appl. Opt. 9, S196 (2007).
Parkin, S. J. et al. Highly birefringent vaterite microspheres: production, characterization and applications for optical micromanipulation. Opt. Express 17, 21944–21955 (2009).
Vikulina, A. et al. Mesoporous additive-free vaterite CaCO3 crystals of untypical sizes: from submicron to giant. Mater. Des. 197, 109220 (2021).
Cheng, B., Lei, M., Yu, J. & Zhao, X. Preparation of monodispersed cubic calcium carbonate particles via precipitation reaction. Mater. Lett. 58, 1565–1570 (2004).
Nagesh et al. Birefringence of a normal human red blood cell and related optomechanics in an optical trap. J. Biomed. Opt. 19, 115004 (2014).
Murata, Y. et al. Detection of vascular bundles using cell wall birefringence on exposure to polarized light. Ind. Crops Prod. 65, 190–197 (2015).
Wu, Y.-J. et al. Controllable microparticle spinning via light without spin angular momentum. Phys. Rev. Lett. 132, 253803 (2024).
Bradshaw, D. S. & Andrews, D. L. Manipulating particles with light: radiation and gradient forces. Eur. J. Phys. 38, 034008 (2017).
Liu, Y. et al. Optical single-pixel volumetric imaging by three-dimensional light-field illumination. Proc. Natl. Acad. Sci. USA 120, e2304755120 (2023).
Acknowledgements
This work was supported by the Anhui Natural Science Foundation (2208085J24, L.G.), National Natural Science Foundation of China (12474318 (L.G.) and 124B2076 (Y.W.)). L.G. acknowledges the support from the USTC Tang Scholarship. C.Q. acknowledges the support from National University of Singapore (A-0005947-16-00). The authors acknowledge support from the USTC’s Center for Micro and Nanoscale Research and Fabrication. The authors thank Dr. Xuan Nie from the School of Chemistry and Materials Science at USTC and Prof. Aiqun Yuan from Guangxi Minzu University for their help in the synthesis of cubic calcite microparticles.
Author information
Authors and Affiliations
Contributions
L.G., Y.W., and C.Q. conceived the project. Y.W. set up the system and performed the simulations and experiments. L.G., Y.W., and C.Q. analyzed the experimental results, designed the figures and wrote the manuscript. J.Z., P.Y., Y.-F.L., and Z.W. discussed the results. L.G. and Y.-M.L. provided supervision of the project. All the authors were involved in revising the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Karen Volke-Sepúlveda and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Wu, YJ., Zhuang, JH., Yu, PP. et al. Time-varying 3D optical torque via a single beam. Nat Commun 16, 593 (2025). https://doi.org/10.1038/s41467-024-55781-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-024-55781-y
