
Abstract
Base-isolated structures are extensively used in critical infrastructure and lifeline projects. Current response spectrum methodology for determining seismic actions has limitations in designing long-period base-isolated structures. Based on a two-degree-of-freedom (2DOF) model that accounts for the non-proportional damping characteristics of isolation bearings, this study analyzes the filtering characteristics of the isolation layers through spectral analysis of both original and attenuated ground motions. Theoretical and experimental results demonstrate that designing the superstructure using the "filtered response spectrum(FRS)" is more rational compared to conventional design response spectra(DRS). Shaking table tests under white noise and seismic excitations verify the filtering effect of isolation bearings: filtered acceleration time-history are reduced to 1/3–1/2 of the original peak values, with the FRS exhibiting decreased peaks, rightward shifts, and significantly shortened platform segments. The filtering principle, rather than period elongation alone, better explains the isolation layer’s effectiveness, particularly for structures with inherently long natural periods.Current code-based design spectra inadequately capture the filtered seismic input, necessitating revisions to incorporate isolation-specific filtered spectra for rational and resource-efficient designs.
Similar content being viewed by others

Introduction
Base-isolated structures have demonstrated excellent seismic performance, leading to their widespread application in critical infrastructure and lifeline engineering projects1. Seismic isolation technology decouples the superstructure from ground motion by installing isolation devices with low lateral stiffness, high damping, and energy dissipation capacity at the base or intermediate levels of a structure. These devices absorb seismic energy, reducing energy transfer to the superstructure and mitigating earthquake damage2. While response spectrum theory3,4 underpins current seismic design, it inadequately addresses long-period base-isolated structures due to limitations in long-period spectral regions5,6,7,8,9,10,11,12,13. This critical limitation necessitates adopting a spectral filtering paradigm2,14,15. The filtering principle posits that ground motions are attenuated into modified excitations after passing through isolation layers with low stiffness and high damping. Consequently, designing superstructures of base-isolated structures should incorporate filtered excitation input rather than original ground motions.
This study develops a two-degree-of-freedom (2DOF) analytical model16,17,18 integrating non-proportional damping19,20,21,22,23,24,25,26,27,28,29,30 to systematically evaluate isolation layer filtering characteristics through theoretical derivations and experimental verification.Comparative analysis between FRS and DRS establishes an enhanced methodological foundation for superstructure design optimization.
Isolation layer response spectra
Finite element model and numerical simulation
The prototype base-isolated structure is configured with the following principal parameters: seismic fortification intensity of 8 degree (0.20 g), Site Class II, Seismic Design Group III, comprising four principal above-grade stories with an auxiliary partial 5 th level, yielding a total structural height of 18.9 m. A total of 34 isolation bearings — including LRB400 (Lead Rubber Bearing), LRB500, LNR500 (Natural Rubber Bearing), and LRB600 — are strategically positioned beneath each frame column in accordance with load distribution requirements. The ETABS finite element modeling of the structure is shown in Figure 1.

Computational model of the base-isolated structure.
The base-isolated structure is simplified into a MDOF system model, with mass and stiffness values for each floor are obtained from ETABS calculations, and MATLAB is utilized for programming. Given the fundamental objective of base isolation is to maintain the superstructure elasticity, the distinctions in the MDOF system model primarily focus on the isolation layer. Four distinct analytical cases are established:
-
Case1: Linear isolation layer with proportional damping + elastic superstructure
-
Case2: Linear isolation layer non-proportional damping + elastic superstructure
-
Case3: Nonlinear isolation layer with proportional damping + elastic superstructure
-
Case4: Nonlinear isolation layer with non-proportional damping + elastic superstructure
The non-proportional characteristics of the base-isolated structure are represented using a partitioned Rayleigh damping model, while isolation layer nonlinearity is described by Bouc-wen model31. The filtering effects of the isolation layer under these four cases are illustrated in Fig. 2. The results demonstrate that incorporating non-proportional damping and nonlinear characteristics in the isolation layer significantly enhances seismic energy dissipation, thereby achieving approximately 60% reduction in peak acceleration time-history amplitudes at the top of the isolation layer.

Comparison of filtering effects in base isolation layers.
The filtered excitations that is attenuated ground motions (indicated by red dashed lines in Figures 2a-2 d) were implemented as seismic inputs to the superstructure. Compare the numerical calculations(MATLAB) with the time-history analysis results, as shown in Figure 3.

Comparison of numerical vs. time history analysis.
From Figure 3, it can be observed that the displacement at the first floor obtained from time history analysis is significantly reduced. This occurs because the time history analysis is conducted for base-isolated structures, while Cases 1–4 involve inputting filtered excitations into the superstructure. The figure further reveals that considering the nonlinear behavior of the isolation layer leads to numerical analysis results closely aligning with those from time history analysis. Crucially, the numerical results converge with time-history data when isolation layer nonlinearity is considered (Cases 3–4), achieving mean relative discrepancies of 32% and 26%, respectively. Conversely, neglecting nonproportional damping characteristics (Cases 1–2) leads to 82–84% deviations, particularly in top-story response predictions.These findings underscore the necessity of concurrently modeling both nonlinear mechanical behavior and nonproportional damping in base-isolation simulations.
Strong motion records17,32
Extensive researches indicate that response spectra are directly influenced by site conditions33,34,35. Seismic codes mandate that the site for base-isolated structures should be categorized into Site Classes I, II, and III. Near-field ground motions possess significantly different characteristics from far-field ground motions, exerting a more severe impact on buildings. Consequently, to enhance the adaptability of the response spectra obtained for base-isolated structures, 1217 strong ground motion records from the Pacific Earthquake Research Center (PEER) in the United States were selected and partitioned into nine groups, including Near-field pulse (NF), Near-field non pulse (NFN), and Far-field (FF) at Site Classes I, II, and III, respectively, as delineated in Table 1. The selection criteria for strong motion records are as follows: (1) The earthquake magnitude is 5.0 or above; (2) The peak acceleration is greater than 0.01 g; (3) The site conditions are consistent with the requirements for building sites when seismic isolation design is adopted for structures in the Chinese seismic design code; (4) The epicentral distance is within 100 km.
Isolation layer spectra
For base-isolated structures, the numerical analysis results obtained from both non-proportional damping linear and nonlinear models demonstrate negligible discrepancies compared to time history analysis results. Therefore, only the non-proportional damping characteristics of the base-isolated structure are considered when establishing the isolation layer spectra in this paper. To maintain generality across superstructure configurations and ensure broad applicability of the derived spectra, the structural system is simplified through a two-degree-of-freedom (2DOF) model following the methodology in Reference17. This idealized representation consists of a concentrated mass for the superstructure and a separate mass-spring-damper system for the isolation layer, as illustrated in Figure 4. The motion equation as follows:

DOF Simplified model.
Here, \(\left[ M \right],\left[ C \right],\left[ K \right]\) represent the mass matrix, damping matrix and stiffness matrix of the simplified model, respectively; \(\left\{ {\ddot{X}} \right\},\left\{ {\ddot{X}} \right\},\left\{ X \right\}\) represent the acceleration, velocity, and displacement of the superstructure and isolation layer relative to the ground; \(\left\{ {\ddot{x}_{g} } \right\}\) is the ground motion acceleration.
In the base-isolated structures, the damping characteristics of the isolation system and the superstructure are quite different, using the partitioned Rayleigh damping model proposed in Reference20, the damping matrix in the motion equation is expressed as:
Here, \(\left[ C \right]\) is the non-proportional damping matrix, \(\left[ {C_{0} } \right]\) is the proportional damping matrix, \(\left[ {C_{r} } \right]\) is the residual damping matrix of non-proportional damping。
\(F_{y} = k_{b} x_{y}\) are the proportional damping coefficient between the superstructure and isolation layer:
Here, the damping ratios of the superstructure(\(\xi_{t} = 0.05\)) and isolation layer(\(\xi_{b} = 0.20\)) 。\(\omega_{1}\)、\(\omega_{2}\) are the first and second natural circular frequencies。
Thus, the motion equation (1) becomes::
Here, \(m_{b}\)、\(m_{t}\) are the masses of the isolation layer and superstructure; \(k_{b}\)、\({\kern 1pt} k_{t}\) are the equivalent stiffness of the isolation layer and stiffness of the superstructure; \(\ddot{x}{}_{b},\dot{x}_{b} ,x_{b}\) are the relative acceleration, velocity, and displacement of the isolation layer under seismic action; \(\ddot{x}{}_{t},\dot{x}_{t} ,x_{t}\) 为 are the relative acceleration, velocity, and displacement of the superstructure under seismic action; \(\ddot{x}{}_{g}\) is the ground motion acceleration。
Using the state-space method, the equation of motion is formulated as:
Here, \(\left[ {{\kern 1pt} I} \right]\) is the identity matrix, \(\left\{ \delta \right\}\) is the unit vector, \(\left\{ y \right\}\) is the output vector。
The isolation layer spectra characterizes the relationship between the maximum response of the isolation layer and the natural period of the base-isolated structure. By solving the state-space equations and adjusting the control vector \(\left\{ D \right\}\), the isolation layer spectra can be derived as either the absolute acceleration spectra or displacement spectra of the isolation layer. Mathematically, it is expressed as:
Filtering characteristics of the isolation layer
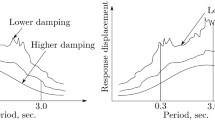
The analytical procedure comprises three distinct phases. First, time-history analysis is conducted on the base-isolated structure, where the filtered absolute acceleration at the isolation layer top serves as spectral input (Spectra 1). This filtered spectra characterizes the superstructure’s peak acceleration response accounting for isolation effects.Subsequently, conventional spectral analysis using original ground motions generates a 5% damped response spectra (Spectra 2), compliant with Ref.36 specifications.In the final phase, considering the significantly higher damping ratio typical of base-isolated structures, the original ground motions are again used for spectral analysis to derive a 20% damped spectra (Spectrum 3). This spectra assumes rigid-body superstructure motion, directly coupling isolation layer response with structural dynamics.To evaluate which response spectra (Spectra 1, 2, or 3) provides the most rational basis for superstructure design, 1,217 ground motions are selected as inputs. The relationship between the maximum response and the natural vibration period of the structure under different conditions is analyzed, as illustrated in Figure 5.

Spectral modalities.
Figure 5a demonstrates notable attenuation in the filtered acceleration spectra compared to conventional DRS across damping ratios (5%or20%). Substituting isolation layer responses (Spectra 3) for superstructure dynamics (Spectra 1) induces 18–22% overestimation, creating material overdesign despite structural conservatism. The displacement spectra comparison (Figure 5b) reveals fundamental limitations: neither code-specified response spectra nor simplified SDOF isolation models adequately capture superstructure displacement responses, necessitating filtered displacement spectrum implementation for accurate base-isolation assessments.
Seismic design of superstructures in base-isolated structures typically incorporates"spectral reduction factors (RF)"per Ref.36, where DRS ordinates are systematically attenuated (Table 2).
According to the Code for Seismic Design of Buildings, the horizontal seismic action on the post-isolation structure can be reduced by three tiers compared to non-isolated structures. The post-isolation time-history analysis directly adopts the maximum horizontal seismic coefficient αmax, which undergoes three-stage reduction: 0.75αmax (RF=0.5), 0.50αmax (RF=1.0), and 0.25αmax (RF=1.5), corresponding to the reduced-intensity spectra in Figure 6.

Comparison of filtered spectra and reduced-intensity spectra.
Comparative analysis reveals critical limitations:
-
1.
0.5-stage reduction (RF=0.5) overestimates responses across all periods;
-
2.
Full-stage reduction (RF=1.0) achieves spectral convergence for T>4.0 s but underestimates 0.05–0.40 s range responses (conventional building period ___domain);
-
3.
1.5-stage reduction (RF=1.5) induces complete spectral divergence, violating code compliance requirements.
The analytical findings conclusively demonstrate that implementing filtered spectra in base-isolated structural systems provides superior convergence between seismic performance and material efficiency compared to conventional reduced-intensity spectra. This methodology shift eliminates the inherent conservatism of code-specified spectral reduction approaches while maintaining requisite structural reliability.
Shaking table test verification
The prevailing theory attributes the seismic isolation mechanism of base-isolated structures is structural period elongation to diminishes seismic demands. Specifically, the isolation layer increases the natural vibration period of the original structure, leading to lower spectral values in the DRS compared to the non-isolated structure, thereby diminishing seismic effects. However, if the structure’s inherent natural period is already large, the post-isolation period extension may not significantly alter the seismic influence coefficient on the response spectra curve, yet the vibration reduction effect remains substantial. In such cases, the filtering principle provides a more coherent explanation. Section"Shaking table test verification"subsequently quantifies these filtering phenomena through controlled shaking table tests.
Overview of the experimental model
The experimental program employed a 1:4 scaled base-isolated structural system, comprising laminated isolation bearings, an isolation interface slab, upper counterweight mass, and substructure columns (Figure 7a). Shaking table specifications (capacity: 6DOF/50kN), construction protocols, and material constitutive relationships are detailed in Ref.37. and excluded for brevity.

Shaking table test model.
Test matrices were categorized by two principal variables:
-
1.
Ground motions (NF vs. FF)
-
2.
Substructure column height configurations (H=1.0 m vs. 1.5 m)
Each case was further stratified by:
-
PGA levels (0.05 g–0.40 g, corresponding to Chinese intensity scales VI-IX)
-
White Noise and Excitation directions (X, X+Y, or X+Y+Z)
Complete test case taxonomies are codified in Ref. [131] Tables 5.11–5.14, with experimental instrumentation schematics provided in Figure 7.
Experimental analysis of filtering characteristics in the isolation layer
The experimental investigation focused on quantifying base-isolation layer spectral filtering characteristics through Column A (Case M2 A).
The study proceeded as follows:
-
1)
Acceleration time histories at the shaking table platform and shaking table platen under white noise inputs were analyzed to evaluate the isolation layer’s filtering behavior.
-
2)
Acceleration time histories at the shaking table platform and shaking table platen were examined using NF and FF ground motions to assess filtering under realistic seismic conditions.
-
3)
The filtered spectra was generated to quantify the isolation layer’s frequency-dependent attenuation effects
White noise shaking table test analysis
The dynamic properties of the experimental specimen---including equivalent-period characteristics, Fourier spectral densities, and frequency response functions (FRF)---were rigorously validated in Ref.37. Modal decomposition analyses established first-mode dominance (modal participation factor: 82.7%), thereby precluding the need for additional verification in this study.
Acceleration time histories the shaking table platform and shaking table platen under white noise excitation (0.05 g-0.40 g PGA) are presented in Figure 8, comparing input signals at the shaking table platform with filtered outputs at the shaking table platen.

White noise.
Pre-isolation slab acceleration magnitudes reached ±0.20 g (Figure 8a), whereas post-isolation measurements demonstrated 70% peak attenuation (0.06 g maximum absolute value) through spectral filtering mechanisms.
Therefore, the base-isolation system demonstrates marked spectral filtering efficacy, achieving 70% attenuation efficiency for seismic excitations traversing its low-stiffness interface.This energy dissipation mechanism reduces transmitted peak accelerations to 30% of input levels while curtailing 85% of input energy flux to the superstructure, thereby enhancing structural safety.
Ground motions shaking table test analysis
The spectral filtering mechanism fundamentally transforms input ground motions (Figures 9a-Fig. 10a) into attenuated ground motions (Figures 9b-Fig. 10b) through base-isolation layer transmission. This input-output relationship was empirically validated through white noise excitation protocols.

NF ground motions.

FF ground motions.
The plotted data in Fig. 9 reveal PGA of NF ground motions attenuation demonstrated 17.7–58.7% reduction efficiency (μ=42.5%) across input levels (0.05 g-0.40 g), exhibiting intensity-dependent nonlinear filtering behavior. The plotted data in Fig.10 reveal PGA of FF ground motions attenuation maintained 63.7–75.8% reduction efficiency (μ=71.9%) across input levels (0.05 g-0.40 g), revealing energy dissipation characteristics. The isolation layer exhibits ground motions attenuation, with varying efficacy depending on seismic record types (near-field vs. far-field).
“Filtered spectra”
The superstructure’s dynamic response is predominantly dictated by filtered(attenuated) ground motions. Consequently, seismic design of the superstructure should employ filtered response spectra (FRS) derived from the modified records, which differ from the code-prescribed spectra in Ref.36. Current reliance on conventional spectra persists in practice, yielding suboptimal in base-isolated structures designs. The FRS which derived from the filtered seismic records is necessary.
Figures 11 and 12 present comparative analyses of original versus filtered spectra derived through numerical simulations, considering two critical parameters: seismic excitation typology (NF vs. FF) and PGA levels (0.05 g–0.40 g).

DRS vs. FRS of NF ground motions.

DRS vs. FRS of FF ground motions.
For both NF and FF ground motipns, after filtering through the isolation bearings and transmission to the isolation layer’s top (Shaking table platen), the FRS exhibits reduced peak values and a rightward peak shift (lengthened predominant periods).
-
1)
NF ground motipns: 18% peak attenuation at 0.05 g PGA due to limited acceleration reduction. For other PGAs, the DRS and FRS share similar shapes, converging at T>4 s.
-
2)
FF ground motipns: Across all six PGAs (0.05 g–0.40 g), filtered spectra show significant peak reductions (63.7–75.8%) and rightward shifts. Spectral shapes remain consistent, with DRS and FRS converging beyond 4 s.
Conclusions
(1) By comparing four analytical cases with time history results, it is demonstrated that non-proportional damping characteristics of the isolation layer and nonlinear mechanical behavior of isolation bearings must be incorporated in MATLAB-based simplified models of base-isolated structures. This dual consideration achieves optimal convergence with time-history benchmarks (mean relative error: 26%).
(2) For seismic design of the superstructure in base-isolated systems:neither the SDOF simplified response spectra nor the code-prescribed"reduced-intensity"DRS adequately represents the true filtered response of the superstructure.
Within the natural vibration period ranges of short-period: T<1 s and medium-period: 1–4 s, whether under the action of far-field or near-field earthquake records, the FRS is smaller than the DRS. When designing base-isolated structures, using FRS can structural ensure safety compliance and material utilization optimization. For the long-period range where T>4 s, FRS is greater than DRS. Only by using FRS for the design of base - isolated structures can the structures be safer.
(3) Under both white noise excitation and seismic actions, the isolation layer’s filtering effect: 17.7–75.8% PGA attenuation.
(4) Owing to the isolation bearings’ filtering properties, seismic actions on the superstructure are substantially attenuated. The filtered spectra---characterized by reduced peaks and rightward-shifted predominant periods---is more suitable for seismic design of the superstructure than conventional spectra.
Data availability
The raw seismic record data that support the findings of this study were obtained from the PEER Ground Motion Database (https://ngawest2.berkeley.edu/users/sign_in?unauthenticated=true)The experimental data that support the findings of this study are available from the author Tianni Xu([email protected]) but restrictions apply to the availability of these data, which were used under license from the Institute of Earthquake Protection and Disaster Mitigation (Lanzhou University of Technology) for the current study, and so are not publicly available. Data are, however, available from the author upon reasonable request and with permission from the Institute of Earthquake Protection and Disaster Mitigation (Lanzhou University of Technology). Data sets generated during the current study are available from the corresponding author Yiming Wang ([email protected])on reasonable request.
References
Tan, P. & Zhou, F. L. Research and engineering application of seismic isolation technology. Constr. Technol. 305(10), 5–8 (2008).
Qu, Z., Ye, L. P. & Pan, P. Principles and techniques of seismic isolation for high-rise buildings. Earthq. Resist. Eng. Retrofit. 31(5), 58–63 (2009).
Housner, G. W. Calculating response of an oscillator to arbitrary ground motion. Bull. Seismol. Soc. Am. 31, 143–149 (1941).
Biot, M. A. A mechanical analyzer for the prediction of earthquake stresses. Bull. Seismol. Soc. Am. 31, 151–171 (1941).
Fang, X. D., Wei, L. & Zhou, J. Characteristics and response spectra of long-period structures under seismic excitation. J. Build. Struct. 35(3), 16–23 (2014).
Han, X. L., You, T. & Ji, J. Study on descending rules of acceleration response spectra in long-period range. J. Vib. Shock 37(9), 86–91 (2018).
Qiu, L. S. Study on design response spectrum of far-field long-period ground motions based on Wenchuan earthquake records [D] (Chongqing University, 2016).
Zhao, C. X. Extraction of long-period components and identification method of long-period ground motions based on HHT [D] (Chongqing University, 2017).
Xiao, M. L. et al. Characteristics and response spectra of long-period ground motions based on actual records. Journal Yunnan Univ. (Nat. Sci. Edit.) 45(S1), 96–101 (2023).
Li, Y. et al. Inelastic response spectra of long-period ground motions. J. Hohai Univ. (Nat. Sci. Edit.) 51(2), 138–149 (2023).
Li, Y. et al. Parametric analysis on elasto-plastic response spectra of long-period ground motion. J. Lanzhou Univ. (Nat. Sci.) 54(1), 90–97 (2018).
Zhou, J. et al. A long-period elastic response spectrum based on the site-classification of Chinese seismic code. Soil Dyn. Earthq. Eng. 115, 622–633 (2018).
Zhang, L. Q. & Yu, J. J. Study on the fitting of long-period ground motion acceleration response spectrum based on genetic algorithm. J. Nat. Disasters 28(6), 11–27 (2019).
Zhang, L. F. et al. Analysis of filtering effects in isolation layers. J. Seismol. Res. 37(2), 298–303 (2014).
Pu, W. C., Xue, Y. H. & Zhang, M. C. Influence of high-pass filtering on displacement response spectra of near-fault pulse-type ground motions. J. Vib. & Shock 39(13), 116–124 (2020).
Liu, Y. et al. Study on seismic response of double particle model of high-rise isolated structure by simple particle method. J. Vib. & Shock 32(1), 8–13 (2013).
Xu, T. N., Du, Y. F. & Hong, N. Elasto-plastic displacement response spectra of base-isolated structures and their application. J. Basic Sci. & Eng. 26(2), 313–323 (2018).
Liu, W. G. et al. Tensile damage limit design theory and fragility analysis for high-rise isolated structures. J. Vib. & Shock 41(21), 168–175 (2022).
Du, Y. F. et al. Real-mode decomposition method for seismic response analysis of non-proportionally damped isolated structures. Eng. Mech. 20(4), 24–32 (2003).
Du, Y. F. & Zhao, G. F. Influence of non-classical damping and optimal damping ratio analysis in isolated structures. Earthq. Eng. & Eng. Dyn. 20(3), 100–107 (2000).
Chen, J., Zhao, C., Xu, Q. & Yuan, C. Seismic analysis and evaluation of the base isolation system in AP1000 NI under SSE loading. Nucl. Eng. Des. 278, 117–133 (2014).
Kilar, V., Petrovčič, S., Koren, D. & Šilih, S. Seismic analysis of an asymmetric fixed base andbase−isolated high−rack steel structure. Eng. Struct. 33(12), 3471–3482 (2011).
Fallah, N. & Zamiri, G. Multi − objective optimal design of sliding base isolation using genetic algorithm. Sci. Iran. 20(1), 87–96 (2013).
Kumar, S. & Kumar, M. Damping implementation issues for in-structure response estimation of seismically isolated nuclear structures. Earthq Eng Struct. Dyn. 50(7), 1967–1988 (2021).
Hall, J. F. Problems encountered from the use (or misuse) of Rayleigh damping. Earthq. Eng. Struct. Dyn. 35(5), 525–545 (2006).
Dao, N. D. & Ryan, K. L. Computational simulation of a full−scale, fixed−base, and isolated-base steel moment frame building tested at E−Defense. J. Struct. Eng. 140(8), 401–405 (2013).
Chopra, A. K. & McKenna, F. Modeling viscous damping in nonlinear response historyanalysis of buildings for earthquake excitation. Earthq. Eng. Struct. Dyn. 45(2), 193–211 (2016).
Zhou, G. L. et al. Base excitation model of structural seismic action and its applicability. J. Build. Struct. 31(S2), 82–88 (2010).
Anajafi, H. & Medina, R. A. Comparison of the seismic performance of a partial mass isolation technique with conventional TMD and base−isolation systems under broad-band and narrow- band excitations. Eng. Struct. 158, 110–123 (2018).
Li, S. Y., Tan, P. & Ma, H. T. Applicability of motion equations and damping matrices in dynamic response analysis of base-isolated structures. J. Vib. & Shock 42(1), 198–206 (2023).
Yanan, W. Research on the seismic performance of the hybrid vibration reduction - isolation control system considering the displacement demand of bearings under pulse - type earthquakes [D] (Lanzhou University of Technology, 2014).
Hongshan, Lü. & Fengxin, Z. Amplification Coefficients of Ground Motion Response Spectra Applicable to Site Classification in China [J]. Acta Seismol. Sin. 29(1), 67–76 (2007).
Yushi, W. et al. Statistical study on characteristics of spectral accelerations normalized by PGA on site classifications I、II and III China. Technol. Earthq. Disaster Prev. 18(04), 854–863 (2023).
Yun-dong, S. H. I. et al. Rocking performance of three-dimensional base isolated structures based on acceleration response spectra. J. Vib. Eng. 36(02), 400–409 (2023).
Fan, K. O. N. G. et al. Stochastic dynamic response of isolated structures with tuned mass damper inerter (TMDI) under near-fault pulse-like ground motions. J. Basic Sci. & Eng. 31(05), 1190–1204 (2023).
GB 50011-2010. Code for seismic design of buildings [S]. Beijing: China Architecture & Building Press, 2010.
Wu, Z. T. Performance analysis and shaking table test of series isolation system considering bearing ultimate deformation [D] (Lanzhou University of Technology, 2014).
Acknowledgments
The authors extend their appreciation to The Development Center for Science and Technology of Higher Education Institutions of the Ministry of Education of China and Chengdu Industrial Vocational Technical College High-level Talent Innovation and Development Scientific Research Team for supporting this work.
Funding
This research was funded by China University Industry-University- Research Innovation Fund: Exploration and Practice of Talent Cultivation for the Intelligent Construction Major in Universities under the New Background of Teaching Reform. This research was funded by Chengdu Industrial Vocational Technical College High-level Talent Innovation and Development Scientific Research Team - Green Building Materials and Energy-saving Technology Application Engineering Center.
Author information
Authors and Affiliations
Contributions
Conceptualization, T. X., Y. W., Q.M., S. Q.; methodology, T.X., Y. W. B. L.; software, Y.W. Q. M.; validation, T. X. Y. W.; formal analysis, T. X. S.Q.; investigation, T. X. Y. W.; resources, T. X., Y. W., Q. M.,S. Q.; data cu ration, T. X.; writing—original draft preparation, T. X.,Y.W.; writing—review and editing, T. X.,Y. W., Q. M.; visualization, T.X., B. L.; supervision, Y.W.,Q. M.; project administration, Y. W., B.L.; funding acquisition, T. X., Q.M., S.Q.
Corresponding author
Ethics declarations
Competing interests
The authors declare no conflict of interest.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Xu, T., Wang, Y., Meng, Q. et al. Filtering characteristics of isolation layer in base-isolated structures and shaking table test verification. Sci Rep 15, 22156 (2025). https://doi.org/10.1038/s41598-025-03196-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-03196-0
