
Abstract
Computer vision-based model attitude and deformation measurement is essential in wind tunnel testing, offering benefits such as non-contact operation, automation, visualization, flexible configuration, and high near-field accuracy. However, the specific conditions of wind tunnel environments impose certain limitations on the practical applications of visual measurement techniques. In response to the intelligent demands of wind tunnel tests, this paper summarizes applications for model attitude and deformation measurement in wind tunnels. Over time, visual measurement techniques in wind tunnels have advanced from simple non-contact methods to real-time attitude and deformation assessments. Current trends highlight a shift towards multi-dimensional data fusion and deep learning techniques, which harness the complementary strengths of various technologies. This integration enables the simultaneous measurement of diverse data, significantly improving the efficiency of wind tunnel tests and achieving higher measurement accuracy.
Similar content being viewed by others
Introduction
High-speed aerodynamic research primarily employs three methodologies: wind tunnel testing, numerical simulation, and flight testing. Among these, flight testing represents the most authentic representation of real flight conditions, as it occurs in a free-flight state. However, it faces significant challenges, including the inability to directly measure aerodynamic parameters, high costs, lengthy testing cycles, and limited measurement method support. In contrast to numerical simulation, wind tunnel testing offers a more realistic physical environment and accurately captures the objective flow processes, making it the predominant method for high-speed aerodynamic research. Due to the sensitive nature of most wind tunnel tests, particularly those related to military applications, there is a scarcity of publicly available studies utilizing computer vision-based measurements. At the same time, the sensitive nature also underscores the critical importance of developing visual measurement techniques within wind tunnels. Consequently, it is essential to advance research focused on computer vision-based measurement methodologies in wind tunnel environments.
A wind tunnel is a tube-shaped facility that generates and controls airflow to simulate gas flow around an object. It allows researchers to measure aerodynamic forces and observe mechanical phenomena in controlled conditions. Wind tunnel experiments are a common approach for researching and verifying the aerodynamic characteristics of the designed aircraft, which aim to simulate the actual flow conditions, measure the aerodynamic parameters of the scaled-down model of the aircraft, and finally obtain the aerodynamic characteristics of the plane in actual flight based on the similarity criterion1. The verification of the actual dynamic characteristics can determine whether the designed aircraft achieves the expected goals and make corrections for optimization. Thus, obtaining the aerodynamic parameters of the aircraft model in the wind tunnel is the foundation for the rational design of the aircraft. Meanwhile, the wind tunnel test data’s accuracy directly determines the aircraft design’s reliability.
As the aircraft design level improves, the aerodynamic characteristics of the aircraft keep enhancing, which poses higher demands on the accuracy of wind tunnel tests and promotes the advancement of wind tunnel experimental data measurement technology. Wind tunnel traditional measurement techniques include gyroscope2, strain gauge balance3, angle sensor4, and fiber grating5, of which the first three methods are contact measurement, which is directly in contact with the model, and therefore will inevitably affect the model stiffness and strength, in addition to the pressure of contact process on the model to produce torsion and bending coupling force, so that the measurement process becomes complex. Fiber grating is a non-contact measurement method. However, this approach requires pasting the bare fiber grating on the surface of the model or embedding it in the interior. The fragility of the fiber grating and the large wind load in the wind tunnel can easily cause damage to the fiber grating, resulting in inaccurate measurements. Therefore, it is necessary to encapsulate the fiber grating. However, pasting the encapsulated fiber grating on the model will change the appearance of the model, which will have an impact on the flow field in the wind tunnel and lead to inaccurate measurement results. As a result, it is necessary to develop a non-contact measurement method that does not change its appearance and is suitable for wind tunnel tests.
The advent of computer vision has opened up new avenues for the measurement of data in wind tunnel tests. The fusion of computer vision technology into wind tunnel tests can address the limitations of traditional measurement techniques6. Historically, computer vision-based measurement technology has primarily concentrated on assessing flow field characteristics within wind tunnels, resulting in a notable gap in non-contact methods for evaluating model attitude and deformation. However, advancements in computer vision technology have increasingly facilitated the application of visual measurement in wind tunnel environments, enabling precise non-contact evaluations of model attitude and deformation. A typical stereo vision system comprises an industrial high-speed camera (CCD or CMOS), targets, a light source, and a computer for image analysis and processing. Once the vision system is installed and configured, real-time access to digital images is achieved, and image processing is performed automatically by the computer. Typically, multiple images are collected once, with the number of images determined by the camera’s frame rate. The parameters in units of pixels can be converted to units of millimeters by a scale factor determined by the physical size and pixel width of an object at the same depth in the video frame7. The core challenge of the application of vision measurement is to establish the geometric transformation relationship between the image plane under the camera coordinate system and the three-dimensional space under the world coordinate system. By utilizing the established geometric transformation relationship, it is possible to derive the shape, size, position, and attitude data of the model through image analysis8. Targets-based stereo vision systems for wind tunnel measurements are generally constrained by specific environmental conditions, in addition to the limitations of the wind tunnel equipment itself, such as limited optical access, which confines visualization of the model only by the observation window. Furthermore, there are also some restrictions imposed by the wind tunnel test conditions, including high pressure and rapid airflow rates9. However, the ease of configuration, flexibility, and relative simplicity of the structure enable the system to achieve high-accuracy measurements despite these limitations. To further enhance the efficiency and comprehensiveness of non-contact measurements in wind tunnels, various techniques are beginning to converge. By integrating different techniques based on computer vision, it becomes possible to measure both the attitude and deformation of a model while simultaneously assessing the flow field of the wind tunnel. This approach reduces the preparation time required for measurements between different tests, and the data obtained from the various techniques can serve as validation for one another, compensating for each other’s limitations.
This paper focuses on the application of computer vision-based techniques for measuring model attitude and deformation in wind tunnels. It reviews the evolution of early technologies in this ___domain, summarizes the current applications and their limitations, and analyzes the future development prospects of these technologies. Different from reference 8, it mainly focuses on basic principles and error analysis, which has been published 10 years ago. Following the introduction, “Computer Vision-Based Measurement Technology in Wind Tunnel” Section outlines the brief history and components of computer vision-based measurement systems in wind tunnels, as well as the targets employed in these measurement systems. “A theoretical model of visual measurement” Section presents the theoretical model of visual measurement, encompassing both monocular and multi-ocular vision. “Measurement of attitude and deformation in wind tunnel” Section summarizes the application of attitude and deformation measurement in wind tunnels, which categorizes attitude measurement into three types: non-real-time, real-time, and deep learning-based approaches. “Data fusion-based measurement in wind tunnels” Section discusses the integration of measurement with flow diagnostics, visualization technology, and CAD models. “Challenge” Section addresses challenges, including vibrations induced by wind loads and distortion of the observation window. “Perspectives” Section provides an outlook on future developments. Finally, Sect. 8 concludes with the contributions of this paper.
Computer vision-based measurement technology in wind tunnel
In addition to measuring the airflow field characteristics in the wind tunnel, it is essential to assess the attitude and deformation of the model, which constitutes a primary objective of the wind tunnel test. By measuring the attitude and deformation of the model under wind load, the aerodynamic characteristics of the aircraft can be analyzed, thereby verifying the reasonableness and safety of the aircraft design and providing a test basis for its optimization.
In wind tunnel tests, visual measurement technology involves capturing images of the model using a camera and transferring these images to a computer. The image processing technology is then employed to automatically analyze the information contained in the images, establishing a correspondence between image coordinates and spatial coordinates to determine the attitude and deformation of the model. Based on the number of cameras used, visual measurement systems can be classified as monocular or multi-ocular. The early development of computer vision-based wind tunnel measurement techniques can be traced back to the 1990s with the introduction of the OPTOTRAK 3D optical motion capture system by the Canadian company NDI, which was utilized for measuring model attitude and deformation in wind tunnels6,10,11. This system employs three mutually perpendicular line-array CCD cameras to measure the model’s 3D coordinates, based on the geometrical principle that three non-parallel surfaces in space will intersect at a single point, achieving a maximum accuracy of 0.01 mm12. However, the OPTOTRAK system is not widely adopted in wind tunnel tests due to its requirement for embedding point light sources into the model’s surface, which can damage the model’s structural integrity and adversely affect its stiffness and aerodynamic characteristics. Additionally, the cameras in this system must be installed at specific angles and distances, complicating on-site installation and calibration. The OPTOTRAK system is limited to capturing a single data target per measurement, necessitating multiple scans to obtain comprehensive data on the model’s attitude and deformation, which is inefficient and insufficient to meet the demands of wind tunnel testing. Laura13 analyzed various wind tunnel measurement systems, including the OPTOTRAK system, and suggested improvements in data processing speed, image quality, and automatic target identification. Currently, a vision system that utilizes targets, also referred to as a videogrammetry method, is widely employed in wind tunnels and has demonstrated excellent measurement results14.
Typical computer vision-based wind tunnel measurement system
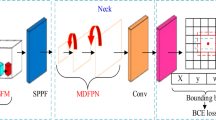
A complete wind tunnel measurement system consists of three main components: image acquisition, image processing, and data management15. Image acquisition is responsible for capturing images that contain information on model attitude and deformation through an optical system comprising an industrial high-speed camera and a light source. The light source enhances the contrast between critical targets and the model, resulting in a clearer and brighter field of view, which contributes to higher-quality images. This improvement assists the camera in capturing better-quality images, thereby enhancing the accuracy of the measurement system and the efficiency of image processing. However, due to the limited visual optical path of the wind tunnel, it can be challenging or impossible to acquire images of the model from various distances and angles. Consequently, camera calibration and image acquisition may be restricted, sometimes necessitating the use of a single camera. Image processing employs built-in software algorithms to analyze the acquired images and extract information such as the type, shape, and ___location of targets. Data management involves manually presetting the requirements to display target data derived from a substantial number of image processing results. The wind tunnel measurement system is illustrated in Fig. 1.

Schematic diagram of wind tunnel test image processing based on computer vision.
Targets
After completing the selection of cameras and lenses, it is essential to choose appropriate targets based on the model. Targets are critical to achieving high accuracy in the vision system because the essence of analyzing the captured image lies in identifying the targets on the model. Therefore, the choice of target settings significantly impacts both the quality of the images and the reliability of the captured data. By locating the 2D coordinates in the image plane of the target’s center with the projection relationship between the image plane and the 3D space, the 3D coordinates of the target’s center can be determined, which enables the subsequent analysis of the model’s attitude or deformation. Targets commonly used in wind tunnel tests include naturally reflective target16, retro-reflective target17, white-light dot projection target18, fluorescent target, and feature-coded target19. There are various shapes of targets, among which circular targets are the most widely used.
Naturally reflective targets come in various types, including white diffuse reflective targets and black diffuse reflective targets, which can be painted or attached to the surface of the model. White and black targets should be used under darker and brighter lighting conditions, respectively, to achieve high contrast and image quality. Retro-reflective targets are less sensitive to light changes and can produce high-contrast images even in low-light conditions. In contrast to naturally reflective targets, the thickness and surface roughness of retro-reflective targets may affect the stiffness and aerodynamic characteristics of the model, which should be taken into account when using it. The white-light dot projection target is a type of contactless marking point that does not impact the model itself. Its projection target falls on the model’s surface, representing the intersection of a specific projector ray with the model’s surface. By calculating the center of each projection target, the three-dimensional coordinates of a series of points can be obtained20. Unlike attached targets, projected targets do not move with the model. For attached targets, during the wind tunnel test, the camera captures different spatial coordinates of the same target over time, with each target representing the spatial position of a specific structural point on the model at various moments. In contrast, projected targets allow the camera to capture a series of spatial coordinates for the model as a whole, where the coordinates of the same projected target at different times do not directly correlate with the model’s motion. Instead, the same projection target at different moments is simply located along a straight line, either close to or far from the projector. To determine the model’s attitude or deformation, it is necessary to find the corresponding projection points of the same structural point on the model at different times. The most commonly used coded targets consist of circles and concentric rings, which add coded information to non-coded targets. These targets are characterized by simple features that are easy to recognize, allowing for the matching of corresponding homonymous points by identifying the unique coded information they contain. Additionally, the number of reciprocal targets is sufficient to meet the demands of wind tunnel testing and to expedite the identification and localization process in the visual measurement system, enabling real-time performance.
A theoretical model of visual measurement
The essence of the computer vision-based measurement system is to use the two-dimensional information from the camera images to obtain the three-dimensional information of the object being measured. The camera imaging process can be described by the small-hole imaging model, which represents the correspondence between the two-dimensional image plane and the three-dimensional spatial coordinates21.
As shown in Fig. 2. P(xw, yw, zw) is a point on the model in the world coordinate system. According to the geometrical projection relationship, the projection point of point P on the image plane is p(x, y). Due to camera lens imaging aberrations, such as radial and eccentricity aberrations, the projection point of P on the image plane will shift relative to the ideal projection point. The position and orientation of the camera coordinate system concerning the world coordinate system are called external parameters. The origin of the camera coordinate system is the center of focus, whose coordinates in the world coordinate system are (xc, yc, zc). The center of focus essentially treats the camera as a point, establishing a geometric relationship with it as the center of projection. The projection point of the center of focus on the image plane is the principal point (u0, v0), and the image coordinate system and the pixel coordinate system do not coincide due to the offset of the principal point. The vertical distance from the camera’s focusing center to the image plane is the focal length f. Internal parameters can be determined from the geometric projection relationship between the focusing center and the image plane22. The purpose of camera calibration is to determine the internal and external parameters from multiple images with different positions and orientations, as well as to address the imaging aberrations of the lens, facilitating the correction of the captured photographs.

Visual measurement model for test of wind tunnel.
Single camera measurements
In a wind tunnel testing environment utilizing a single camera, it is an inherent challenge to determine the three-dimensional coordinates of targets on the model based solely on a sequence of captured images. This limitation arises because the camera provides only two equations corresponding to the (u, v) coordinates at each moment in time, making it impossible to uniquely resolve the three unknowns represented by (xw, yw, zw). To address this issue, constraints must be introduced to the model to reduce the number of unknowns, thereby enabling the solution of the remaining two coordinates. In practice, one common approach is to fix the yw coordinates of the model as constants. This constraint simplifies the equations, allowing for the determination of the other two coordinates, xw and zw. This methodology is illustrated in Fig. 3 below.

Monocular visual measurement model for wind tunnel test.
In the figure, the symmetry plane of the aircraft model is parallel to the XOZ plane of the world coordinate system, and the yw coordinate remains constant over time. Consequently, the model undergoes only a pitching motion under wind load. The advantages of employing a single-camera measurement system include its suitability for measuring the attitude of a model exhibiting a singular pitching motion and the simplicity of its configuration. However, to achieve highly accurate results, it is essential to ensure that the angle between the camera’s optical axis and the plane where the target is located, with a constant value of yw, exceeds 20°23. Notably, when this angle is 0°, it becomes impossible to uniquely determine the three-dimensional coordinates of the target.
Multi-ocular camera measurement
Unlike monocular vision, multi-ocular vision refers to a measurement system that utilizes two or more cameras. Taking binocular vision as an example, the three-dimensional coordinates of the unknown target in the image captured at each moment can be derived from equations based on the projection relationship without the need for additional constraints. The principle of which is illustrated in Fig. 4 below.

Stereo visual measurement system for wind tunnel test.
Where f notes the focal length and n represents the principal point of the left and right cameras, respectively. Additionally, let p be the imaging point of the three-dimensional coordinates on the model within the two-dimensional image coordinate system. Since binocular vision can determine the three-dimensional coordinates of targets based on known points in the image, it is capable of measuring a variety of motion attitudes and deformations of the model in the wind tunnel test with greater accuracy.
Camera calibration
During wind tunnel tests, the attitude and shape of the model undergo dynamic changes in response to the wind load. Accurately determining the state of the model hinges on establishing the geometrical relationship between the three-dimensional points in the world coordinate system and the two-dimensional points in the image coordinate system24. The objective of camera calibration is to ascertain the internal and external parameters of the vision measurement system and to establish this correspondence effectively.
Traditional linear algorithms often separate the internal and external parameters of the camera by directly solving the associated equations without iteration, but these methods generally yield lower accuracy25. Hallert was the first to implement the least squares method for processing camera calibration parameters. Subsequently, Beyer extracted 3D information and camera parameters from planar images using least squares estimation grounded in standard photogrammetry. Tsai26 proposed a two-stage approach based on the Direct Linear Transformation (DLT) algorithm, which first employs linear constraints to resolve external parameters before applying iterative optimization to obtain internal parameters. Zhang27 advanced this methodology by utilizing a calibration plate to derive initial estimates for the camera’s internal and external parameters through a single response matrix. He then introduced distortion parameters, refined them using least squares iteration, and ultimately optimized all parameters using maximum likelihood estimation (MLE), which is the most widely adopted calibration technique to date. In contemporary practices, nonlinear iterative optimization methods typically involve transforming the equations into a linear form to procure accurate initial values, followed by iterative optimization processes to refine the results28,29,30, what they used for camera calibration in wind tunnels are shown in Fig. 5.

In wind tunnel testing, a calibration target is placed around the model for camera calibration, however, the camera can only capture images through the observation window on the wall of the wind tunnel. Due to the limited dimensions of this window, aligning the size of the calibration target with the camera’s field of view presents a challenge. Furthermore, once the camera has been calibrated, the image resolution becomes fixed, if the image of the calibration target appears smaller, its effective resolution decreases correspondingly, impacting the accuracy of the parameters derived during calibration.
To address this issue, the camera calibration process can be divided into two distinct steps, effectively performing two separate calibrations. First, the calibration target is placed outside the wind tunnel, ensuring that the camera’s field of view accommodates the entire size of the calibration target. This setup allows the image of the calibration target to fill the camera’s field of view, enabling a more precise determination of the camera’s internal parameters. In the second step, the calibration target is positioned around the model to acquire the external parameters. The internal parameters obtained from the first step remain constant, provided that the camera and lens settings do not change. This approach effectively enhances the accuracy of the camera calibration parameters. Machacek31 proposes a two-step method for camera calibration in wind tunnels, utilizing a planar calibration target marked with a point structure and precision-drilled holes of 0.01 mm depth as calibration markers. The first step involves translating the plate to a specified distance to generate a set of three-dimensional calibration points, enabling the determination of the internal parameters. In the second step, a self-calibration algorithm is employed to ascertain the external parameters. This process utilizes a two-point marker comprised of a low-distortion carbon fiber rod and two point-source LEDs that move randomly within the measurement area, as shown in Fig. 6. Each image captured corresponds to the position of the calibration target, from which the external parameters can be derived. Compared to typical wind tunnel calibration methods, this approach achieves a camera orientation accuracy of 0.002°, a positional accuracy of 2.5 mm, a standard deviation of 0.7 mm for length estimation, and a velocity accuracy of up to 0.00006 m/s over a segment length of 10 cm.

Mobile calibration rod featuring two-point source LEDs mounted and overlay of 600 image pairs produced by the calibration rod31.
Measurement of attitude and deformation in wind tunnel
Attitude estimation
The attitude of a model refers to the process of its spatial motion changes, typically recorded during wind tunnel tests using target-based videogrammetric measurements13,32,33. Videos are made up of a series of images and thus have two domains: the spatial ___domain corresponding to a 2D field of brightness values in a single image, and the time or temporal ___domain corresponding to the image as it evolves in time to make a video34. The spatial motion of the model can be quantitatively described with precision by multiple targets attached to the rigid segments of its surface. Attitude estimation based on these point features fundamentally involves solving the Perspective-n-Point (PnP) problem.
Non-real-time attitude estimation
In terms of speed criteria, wind tunnel test attitude estimation can be categorized into non-real-time methods and real-time methods. Non-real-time methods rely on the analysis of images captured by the camera through offline post-processing techniques. Ruyten35 designed a position and attitude measurement method using trinocular vision in a transonic wind tunnel at the Arnold Center for Engineering Development, which utilizes a simplex iterative method to minimize the sum of squared errors. The determination of the model’s position and attitude parameters using targets with known positions relative to the model enables the fusion of measurements from multiple cameras, even when their fields of view don’t overlap. However, experimental results revealed an error of 0.05° between the angles measured by the camera and the theoretical angles. Additionally, factors such as camera vibration were identified as influencing the measurement results. Chen36 proposed a visual measurement method utilizing monocular vision for a model mounted on a wire-driven parallel suspension system. This suspension system effectively reduces airflow interference, thereby making the wind tunnel test environment more representative of real flight conditions. The method employs the generalized inverse least squares method through HALCON software to measure the model’s attitude. However, only three landmarks are used for feature extraction in this method, and the experimental results may have accidental errors.
Spain37 measured pitch angle, displacement, and model deformation at different Mach numbers and dynamic pressures, there were anomalies in some of the data points in the experiment that deviated too much from the theoretical values, by analyzing the experimental results found that a structural failure occurred in the control surfaces, affecting the experimental process and the efficiency of the measurements, which could be avoided under real-time detection. The distribution of targets in the model is shown in Fig. 7. Shewhart’s variable control charts (also known as statistical quality control charts) were used to assess the consistency and uncertainty of the videogrammetric model deformation (VMD) system. This included \({\overline{\text{X}}}\) and R control charts to assess the consistency of the data and to analyze the variability of individual samples. \({\overline{\text{X}}}\) and R present the measurement average and the Xmaximum minus Xminimum for each group. The experiments described in this paper utilize calibration blocks for calibration. While this method achieves high accuracy, the calibration process is complex and the installation poses challenges. Leifer38 discusses the measurement of acceleration in wind tunnel tests using videogrammetric measurement. Since acceleration can’t be obtained directly from visual measurements and requires differentiation twice based on displacement, mathematical filtering is applied using Savitzky and Golay algorithms to minimize noise generated during the differentiation process.

Model of the aircraft and distribution of targets37.
Real-time attitude estimation
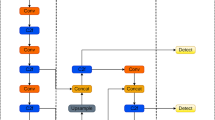
Real-time attitude estimation not only enhances speed but also improves test efficiency by monitoring the validity of the data during the experiment. Thomas39 designed a binocular vision-based model attitude measurement system for supersonic wind tunnels, employing the least squares method to determine the model’s position and attitude while investigating the impact of vibration on measurement accuracy, results of the method are presented in Fig. 12a. To address the inconvenience of moving calibration targets and prevent delays in wind tunnel operations, a system utilizing a fixed calibration plate with beveled edges is proposed, eliminating the need to remove the camera for in-situ calibration. The camera is fixed at the top of the wind tunnel, and the vibration of the wind tunnel equipment will change the external parameters of the camera and introduce errors. Liu40 introduced a real-time attitude estimation system for low-speed wind tunnels utilizing trinocular RGB-D cameras across the field of view (FOV), as shown in Fig. 8. The system begins by developing a multimodal initialization method to measure the spatial relationship between the camera and the aircraft. It then automatically and accurately acquires images using a cross-FOV model and locates the center of the AprilTag. Next, image features are extracted using a fast binary descriptor called ORB, through a bundle adjustment process to minimize reprojection error. Finally, the model’s sparse point cloud and attitude information are obtained. Results of the method are shown in Fig. 12b. However, when the wing is deformed, there are errors in the process of determining the center point of the model.

The real-time RGB-D method40: (a) overview of the method showing the data-flow starting from RGB-D streams (b) the synthetic RGB-D input and the estimated point cloud result of the system.
In addition to the linear layout of the targets, a reasonable spatial layout will enhance the accuracy of the measurement. Zhen41 proposed a case deletion diagnostic measurement method based on videogrammetric measurement techniques and binocular vision with a spatial coding layout, as shown in Fig. 9a, to achieve real-time, high-accuracy position acquisition. This case deletion diagnosis is employed to eliminate incorrectly matched target points during the template matching process, ensuring that the measurement system accurately captures valid and effective model pose information. Liu42 proposed a real-time position measurement method based on binocular vision for dark and transonic rolling wind tunnel environments. Retro-reflective targets are detected using a background subtraction algorithm, ensuring that high-quality images can still be extracted in low-light conditions, and the center of targets is identified by the centroid method. To address the issue of high-speed model scrolling, the targets are arranged in an acceleration-spiral layout to prevent obscuration during the model’s movement, as shown in Fig. 9b. For these two methods of special target layout, the error of roll is higher than pitch and yaw Angle.

Fan43 employed the Optitrack system to assess the model’s attitude within a low-speed wind tunnel. Initially, the system’s accuracy was evaluated through ground static experiments, which demonstrated that the static position accuracy was better than 0.07 mm, while the accuracy of attitude angle measurement reached 0.05°. These results align with the requirements for dynamic test accuracy. Furthermore, the dynamic tests confirmed that the system’s accuracy could achieve up to 0.5°, and the model data updates met the minimum requirement of 100 Hz for free-flight testing. This confirms the system’s potential applicability in free-flight tests and indicates improvements in both test efficiency and data quality. It is important to clarify that the Optitrack system discussed herein is distinct from the OPTOTRAK system. The OPTOTRAK system employs three mutually perpendicular linear array CCD cameras for measurement, whereas the Optitrack system is a motion capture system that allows flexible configurations with multiple high-speed cameras based on the testing requirements, in this case, Fan utilized eight cameras, which is a great challenge for wind tunnel equipment layout. Additionally, the Optitrack system utilizes small and thin targets, measuring 0.12 mm in thickness and 6 mm in diameter. These targets are affixed to the model’s surface without compromising its structural integrity or rigidity. The comparision of attitude estimation methods used in test of wind tunnel is listed in Table 1.
Deep learning-based attitude estimation
The high cost and substantial spatial requirements of wind tunnel equipment, coupled with the military confidentiality associated with many wind tunnel tests, have resulted in a limited number of studies focused on wind tunnel testing utilizing computer vision techniques. Furthermore, deep learning approaches generally necessitate a large volume of training data, and the amount of publicly available data from wind tunnel tests is relatively scarce. Currently, there is still a big gap in wind tunnel attitude measurement based on deep learning. The few researchs have been done on deep learning applications in wind tunnels primarily revolves around point features, employing neural networks to predict the 2D–3D correspondence of these features to determine target positional parameters. For instance, Zhang44 utilized DAVANet to mitigate image blur, as shown in Fig. 10. However, a notable drawback of those approaches is that the neural network is optimized merely for feature extraction and matching during training, which doesn’t fully leverage its advantages for measurement tasks. Nonetheless, this limitation underscores the significant untapped potential for the application of deep learning within this ___domain.

Overall structure of DAVANet44.
In the context of wind tunnel tests conducted under harsh environmental conditions, Huang45 proposed a method termed Deep Learning Augmented Visual Measurement (DAVIM), as shown in Fig. 11, which integrates Convolutional Neural Networks (CNNs) and Generative Adversarial Networks (GANs). This hybrid approach enhances both the accuracy and robustness of dynamic response measurements of models. Specifically, CNNs are employed for the automated identification of designated targets, while GANs address the challenges of image corruption in severe conditions, thereby facilitating the successful identification of these targets. The DAVIM method demonstrates significantly superior performance compared to traditional sensor-based and videogrammetric measurement techniques, whose results are presented in Fig. 12c.

The framework of the DAVIM45.

Deformation measurement
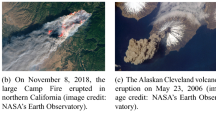
Model deformation measurement is a critical aspect of the wind tunnel visual measurement system. The accuracy of dynamic tests reveals notable discrepancies: an accuracy of 0.5° is achieved when measuring the aircraft model attitude with a nominal pitch of 25°, while an accuracy of 0.18° is observed with a nominal pitch of 10°, which indicates that as the nominal amplitude increases, the measurement error also escalates43. Furthermore, it highlights that under wind load, the non-rigid model experiences elastic deformation. If model deformation is neglected, it can lead to significant errors in the measurement data. The deformation primarily occurs in control surfaces, such as wings and rudder surfaces, and can be quantified by analyzing the changes in spatial coordinates of multiple targets located on these surfaces. NASA has conducted numerous studies on model deformation in wind tunnels over the past 2 decades46,47,48,49. Similarly, the European Supersonic Wind Tunnel50 and the French National Center for Aerospace Research (CNERA)51,52 have developed vision systems for measuring model deformation. Experimental validation has demonstrated that visual measurement systems based on videogrammetric techniques hold significant promise for accurately measuring model deformation.
The fundamental principle of both deformation and attitude measurement involves using a camera to capture targets on the model. By employing the geometric projection relationship, the 2D image points can be utilized to determine the 3D coordinates of the model targets, thereby facilitating the calculation of the model’s attitude or deformation53. The evolution of visual systems for measuring the deformation and attitude of models in wind tunnel tests has progressed from non-contact measurements to real-time vision measurements, and ultimately to high-precision real-time measurements. The feasibility of computer vision-based measurements in wind tunnel tests is firstly validated through static experiments, while dynamic tests are conducted to estimate the methods’ performance. Higher accuracy is achieved by employing multiple cameras and more efficient image processing algorithms that enable real-time measurements.
The model’s attitude can be represented by the orientation of the rigid segments. Differing from it, the deformation of the model refers to the change in attitude of the non-rigid segments relative to the model as a whole at the actual attitude. Thus, the deformation of the non-rigid segments is characterized by the spatial changes relative to the rigid segments. Guo54 presents a high-precision 3D deformation measurement method known as High-Accuracy Deformation Measurement (HADM). This method leverages the principles of structured light to derive accurate phase-height mapping and fringe pattern distribution using an arbitrarily arranged projector in conjunction with monocular vision, as shown in Fig. 13. This innovative approach alleviates spatial constraints between the camera and projector, thereby enhancing practical applicability when compared to traditional Fourier Transform Profilometry (FTP). Additionally, HADM employs dynamic boundary processing algorithms to minimize deviations and uncertainties between the ideal model and real-world conditions. The average measurement uncertainty is 0.0237mm, no more than 0.01% of the side length of 25cm of the FOV.

The flow diagram of the fringe pattern extrapolation and schematic sketches of the experimental setup of wind tunnel54.
Yu55 designed a wind tunnel test deformation measurement system for a vertical propeller hovering micro air vehicle with a flexible aerodynamic shape based on stroboscopic imaging technology and binocular vision. The Scale-Invariant Feature Transform (SIFT) algorithm is used to extract image feature points for feature matching, while outliers are eliminated using the Random Sample Consensus (RANSAC) algorithm to enhance alignment accuracy. Following the calculation of the feature points’ 3D coordinates, the 3D data are fitted using the subdivision surface method to facilitate the computation and visualization of aerodynamic deformation. To address the challenge of measuring surface deformation caused by a limited overlapping area of the point cloud before and after deformation, Liu56 proposed an automatic point cloud alignment method inspired by biological vision. This method involved developing a camera-projector system, as shown in Fig. 14, along with securing a minimum of three cones around the target, which focused on extracting geometrical features by integrating data from multiple views. Initially, the transformation matrix between the two point clouds was computed using a random strategy to register the vertices of the cones. Subsequently, this initial alignment was refined using the Iterative Closest Point (ICP) algorithm, achieving a maximum rotational error of 0.1° and a translational error of 1 mm. To evaluate measurement accuracy, the RMS error was utilized.

A flowchart of surface deformation measurement with cones56.
Data fusion-based measurement in wind tunnels
Different technologies exhibit distinct advantages, sensitivities to specific types of information, and inherent limitations regarding their underlying principles and conditions of use. Merely relying on a targets-based visual system to measure model attitude or deformation is insufficient, as cameras can only capture data from targets attached to the model’s surface in a certain regular distribution. This approach presents a discrete characteristic that fails to capture the deformation of non-rigid surfaces between the targets. With the advancement of computer vision-based measurement technology, it has become essential to employ multiple techniques concurrently during wind tunnel tests. The fusion of various independent techniques enhances the comprehensiveness of the measurement system.
Data fusion involves acquiring information through different technologies and combining the characteristics across multiple dimensions. This approach capitalizes on the complementary advantages of diverse information sources, effectively improving the accuracy and robustness of the measurement system and enhancing its overall stability.
Wind tunnel flow diagnostics and visualization technology
The purpose of flow visualization is to visualize fluid movement phenomena. Traditional flow visualization methods don’t incorporate measurement capabilities, they solely illustrate the airflow characteristics within wind tunnels through intuitive physical visualizations, such as the smoke flow method, helium bubble method, and oil flow method. The advent of computer vision has augmented traditional flow visualization techniques, enabling the acquisition of richer flow field information. Through the application of image processing, various colors can be utilized to represent parameter variations, facilitating the depiction of the flow field in wind tunnel images displayed on computers. This improvement enhances both the speed of flow visualization processing and the quality of the images produced. Schlieren graph is one of the most commonly used flow visualization methods in wind tunnel tests, the principle of which is to transform the light disturbed by the flow field into the light intensity distribution recorded on the image plane. As flow visualization technology continues to advance, a range of flow diagnostics and visualization technology has emerged, such as laser-induced fluorescence (LIF)57, laser-Doppler velocimeter (LDV)58, particle image velocimetry (PIV)59, pressure-sensitive paint (PSP)60 and temperature-sensitive paint (TSP)61 measurements. These methodologies possess the capability for both qualitative visualization and quantitative measurement, catering to the demands of assessments in the complex airflow environments typical of wind tunnels. Schematic diagrams of LDV are illustrated in Fig. 15.

LDV experimental equipment in wind tunnels58.
Fusion with flow diagnostics and visualization technology
In wind tunnel visual measurement tasks, the fusion of existing flow diagnostics and computer vision-based measurement enables the simultaneous measurement of flow characteristics and model attitude or deformation, which enhances the efficiency of wind tunnel testing. Furthermore, the ability to cross-verify different measurement data ensures the accuracy of the results. James62 proposed a data fusion method for wind tunnel testing that combines videogrammetry measurement techniques with PSP to synchronously capture surface pressure and model deformation. This approach utilizes a single camera and light source for both methods, thereby simplifying experimental equipment. Additionally, by analyzing the pressure field data obtained from the PSP and incorporating the material properties of the model, it is possible to calculate the deformation field of the model under wind load, the data fusion of two methods enhances the accuracy of deformation measurements35,63. However, simultaneous measurements have not yet been achieved in this research, indicating potential for further development. Burner64 proposed a visual measurement system combining TSP and videogrammetry for simultaneous measurement of model deformation and flow transition. In this case, the TSP is used for transition detection in the boundary layer, and the videogrammetry measures the deformation and torsion of the model’s main wing and flaps. The deformation measurement system is adapted to UV illumination, which ensures that high-contrast images can be obtained during TSP data acquisition, and by setting the parameters of the measurement system, it is possible to realize the use of the normal test section illumination when TSP data are not being acquired.
In the realm of data fusion, notable incompatibilities persist between two prevalent techniques: PSP/TSP and videogrammetry. PSP/TSP necessitates specific wavelength illumination with distinct spectral characteristics and high-resolution cameras65,66. Conversely, videogrammetry requires the acquisition of high-contrast target images and high-speed cameras, which are largely insensitive to spectral characteristics. Consequently, it is imperative to optimize hardware equipment to enable both techniques to share a unified vision system, thereby facilitating synergistic interaction and mutual non-interference. This fusion aims to achieve real-time, simultaneous, and high-precision measurement of characteristics related to pressure or temperature and deformation67. However, it is important to note that PSP/TSP is susceptible to being washed away by airflow during wind tunnel tests conducted at high Mach numbers68, which limits the feasibility of fusing PSP/TSP and videogrammetry methods in high-speed wind tunnel environments.
Nietiedt69 proposed a system that integrates PIV with trinocular vision for wind tunnels characterized by coupled fluid–solid interactions, which can achieve simultaneous measurement of fluid velocity and model deformation through the concurrent fusion of temporal and spatial data, as shown in Fig. 16. Cheng70 developed a model attitude measurement method utilizing the Schlieren graph and monocular vision. Firstly, the contour of the model is extracted from both the Schlieren graph and the images captured by the camera to calculate the initial value of the model’s attitude. The initial value is then matched with the Computer-Aided Design (CAD) model to determine the accurate attitude. In particular, this method requires only the orientations of the camera and the Schlieren graph instrument, eliminating the need for fixed installation in specific positions. This enhances the flexibility of the system, achieving an accuracy of up to 0.1°. Dong71 developed a novel speckle-patterned PSP system that integrates the single-shot lifetime method, binocular vision, and digital image correlation (DIC) technology to realize the simultaneous measurement of pressure and deformation fields of high-speed rotating blades in wind tunnels. The single-shot lifetime method applies high-energy laser pulses to excite the PSP, capturing images from different angles by randomly printing a speckle pattern on the surface of the PSP, which facilitates pixel-level image alignment for the reconstruction of the pressure field. Ultimately, point cloud data are generated through cross-correlation analysis and triangulation, which are then fused with CAD model data to obtain deformation and pressure data. The measurement deviation of the deformation field and the average standard deviation (STD) were 0.13 mm and 200 Pa respectively.

Experimental setup in the wind tunnel and Top view of the wind tunnel. PIV cameras are encircled in green, PIV laser in orange, photogrammetry in blue, and LED lamps in yellow69.
Fusion with CAD model
With advancements in fusion technology, CAD is increasingly integrated into wind tunnel visual measurement systems. CAD provides a virtually error-free model, thus, extracting data from CAD models allows for more accurate characterization of the physical models, thereby enhancing the precision of wind tunnel visual measurement. Zhang44 developed a trinocular visual measurement system that adopts a CAD model transformed into a non-uniform rational B-spline (NURBS) surface to measure the position and attitude of the model. As shown in Fig. 17, this system collects a set of points from the NURBS surface, which are then used as viewpoints for the laser scanner, enabling the automatic generation of scanning paths to efficiently establish the model coordinate system. Kasula72 designed a target-free model attitude measurement method based on binocular vision combined with CAD, exploiting Harris corner points to detect key feature points in the image while tracking these corners in subsequent video sequences by the Kanade–Lucas–Tomasi algorithm. Finally, the attitude angle of the model is calculated using quaternions. What the extended Kalman filter does is to integrate the inertial measurement unit on the model, potentiometer gimbal, image feature data, and CAD model to improve the robustness and accuracy of the system, and the dynamic root mean square errors of roll rate, pitch rate and yaw rate reached 0.0090 rad/s, 0.0262 rad/s, and 0.0034 rad/s, respectively. Comparision of Data fusion-based methods used in test of wind tunnel is shown in Table 2.

Six-step procedure of scan path generation44.
Challenge
The application of videogrammetry techniques for measuring model deformation and assessing uncertainty in the attitude angles of wind tunnel models is thoroughly examined under both static and dynamic conditions73,74,75. The analysis includes a sensitivity assessment focused on deriving 3D spatial coordinates from 2D image coordinates, which is crucial for ensuring measurement fidelity, and highlights the dynamic effects on model deformation and the accuracy of attitude. Through this research, a clearer understanding of these challenges is achieved, providing valuable insights for advancing vision system development within wind tunnel tests. Contrasting with conventional visual measurement environments, wind tunnels present unique challenges due to their constrained and turbulent airflow conditions. The interaction between the airflow and the test model generates intricate aerodynamic phenomena that can significantly impact measurement accuracy. These complexities complicate visual measurements and necessitate innovative approaches to improve the reliability and precision of the computer vision-based measurement employed in such environments. With the advancement of wind tunnel visual measurement systems, research has shifted from solely focusing on technology to including error analysis of wind tunnel problems. Challenges such as model vibration and observation window distortions have been identified, leading to targeted solutions that enhance measurement accuracy. These improvements not only refine the measurement precision but also optimize the overall wind tunnel visual measurement system.
Impact of vibration
There are two types of vibration in wind tunnel tests, one is the vibration of the test section and the other is the vibration of the support mechanism and model44,76. The optical pathway within the wind tunnel is constrained, necessitating that the camera captures images of the model through an observation window. Aimed to maximize the utilization of camera resolution, the camera is positioned close to this window. Consequently, vibrations from the test section can induce camera vibrations, resulting in changes to its position and orientation alterations that affect the external parameters and introduce significant errors in the measurement of three-dimensional spatial coordinates. The second type of vibration arises from the aerodynamic load associated with the incoming airflow in the wind tunnel test section, which leads to vibrations in the model, thereby impacting measurement accuracy.
Traditional camera calibration typically involves the use of calibration targets with known three-dimensional structures, such as calibration blocks or checkboards. However, these methods are inadequate for addressing the challenges posed by the first vibrations during the measurement process in a vision system. A self-calibration approach can be employed to mitigate the effects of the first vibration-induced changes in the camera’s external parameters77,78,79,80, which doesn’t require auxiliary calibration targets and can be executed concurrently with the camera’s visual tasks compared to conventional calibration methods. This characteristic makes it particularly suitable for continuously operating visual systems. Notably, self-calibration can achieve near real-time processing speeds, allowing for the adjustment of the camera’s external parameters in response to vibrations, thereby ensuring measurement accuracy. Chen81 proposed an innovative two-step calibration method leveraging camera self-calibration techniques to mitigate the impact of camera vibrations on measurement accuracy. The methodology commences with a rapid, non-iterative process to derive the initial estimates of the camera’s orientation. This is followed by the application of a globally convergent orthogonal iterative approach to refine these estimates, resulting in an accurate final solution. Operating at a camera frame rate of 150 Hz, the method was validated through wind tunnel experiments, where it demonstrated a significant enhancement in measurement precision for the vision system at a wind speed of Mach 5. The findings revealed a substantial reduction in the maximum measurement error, decreasing from 0.516 to 0.044 mm. Furthermore, the calibrated system exhibited improved accuracy and stability, particularly in the presence of high levels of noise. Additionally, the model’s vibration frequency was quantitatively analyzed as shown in Fig. 18.

Chen’s method: (a) the measuring model, (b) the spectrogram of P4, P5, P6, P7, P8, and P981.
The interaction between an aircraft’s structural characteristics and aerodynamic nonlinear forces induces vibrations in the model, which leads to discrepancies between the measured data and theoretical predictions, thereby introducing errors into the test outcomes. In order to address these challenges, it is essential to conduct vibration analysis concurrently with the measurement of the model data. By integrating vibration analysis, researchers can better calibrate the system data, enhancing the accuracy and reliability of the measurements, which not only improves the fidelity of the experimental data but also facilitates the validation and optimization of the model design82,83,84.
Zhu85 measured the vibration of a lightweight flexible wing in a wind tunnel test by using the videogrammetric measurement method and analyzed the dynamic characteristics of the wing such as the vibration frequency and the amplitude, in which the frequency measurement relative precision is superior to 0.5%, its absolute precision is superior to 0.1 Hz in a low-frequency range. Chang86 carried out a static single-point sinusoidal function test and wind tunnel dynamic test for the vibration of the model in the wind tunnel test based on computer vision, identified and located the target by Harris corner point detection technique as shown in Fig. 19, finally tracked the motion of the target point using the correlation method. The static experiments showed that the measurement error was small at 0.5 Hz low frequency, with an average value of 0.12–0.29mm and a standard deviation of 0.4 mm. However, it was observed that the standard deviation increased to 1.4 mm at a high-frequency vibration of 5 Hz, indicating that measurement error tends to escalate under high-frequency vibration conditions. Despite this increase in error, the dynamic vibration experimental data collected from the wind tunnel exhibited a strong consistency with the results obtained from the sensor measurements. This agreement suggests that the measurement system maintains acceptable accuracy levels under these challenging conditions, effectively meeting the established requirements for reliability and precision in the data collected during the experiments. Huang87 proposes a vibration measurement method based on the template corner-point algorithm, which combines the advantages of the template matching algorithm and the corner-point detection algorithm for accurately tracking the target point as shown in Fig. 20. The measurement results are consistent with the displacement and acceleration sensors. Le88 employs a novel approach that integrates computer vision with phase-based video motion magnification (PVMM) to effectively capture the vibrations of a model within a wind tunnel environment. This method utilizes the center-of-mass-based bounding box tracking (CBBT) technique with two cameras to accurately track the model’s motion across each video frame as shown in Fig. 21. From the magnified video, the model’s time-range displacements are extracted, allowing for a detailed analysis of its vibrational behavior. Subsequently, the intrinsic frequency and damping ratio of the model are derived from the displacement data using the Wavelet Screening Random Decrement Technique (WS-RDT). The results demonstrate high precision, with measurement errors of only 0.003 Hz for the intrinsic frequency and 0.19 for the damping ratio, which not only enhances the understanding of the model’s vibrational characteristics but also provides a robust framework for analyzing dynamic behavior in complex aerodynamic environments.

Target point extraction: (a) target pattern, (b) zoom-in of target pattern, (c) intersection of image skeleton, (d) detected target point86.

(a) An example of mismatching problem of the corner detection algorithm (b) process of the template-corner algorithm (c) comparison of Non-dimensional PSD functions obtained by the laser displacement sensor and VVM method87.

Pixel displacements from two camera videos88.
Distortion of the observation window
In the wind tunnel test section, the observation window serves as the sole access for capturing images of the model. Typically, the thickness of this window exceeds that of conventional glass to withstand the strong wind loads present in testing environments. However, this increased thickness can lead to distortions of the observation window during the imaging process89,90. These distortions can significantly impact the accuracy of measurements obtained from the vision system, introducing errors that may compromise the reliability of the data collected during tests.
Ma91 introduced a multi-layer refraction photogrammetry model utilizing binocular vision with multi-layer refractive geometry to effectively account for light refraction caused by the observation window between the model and the camera. The approach employs Zhang’s calibration method to initially calibrate the camera, which then calibrates the thickness of the observation window and the direction vectors of each segment of the optical path92. To enhance the accuracy of this calibration, the system optimizes these parameters by leveraging constraints derived from the distances between points on a calibration target. This innovative calibration process enables high-precision measurement of the multi-layer photographic model. Experimental validation of this method reveals a maximum displacement error of just 0.11 mm. Additionally, the method achieves notable accuracy in attitude measurements, with maximum deviations of 0.1° for pitch angle, 0.11° for yaw angle, and 0.32° for roll angle. Liu93 employed computer vision to quantify the model attitude, taking into account the refraction of the observation window as shown in Figure 22. Furthermore, an imaging model was proposed that incorporates the effect of refracted light. Initially, the internal matrix of the camera was calculated, followed by the determination of the normal vectors of the observation window to derive the external parameters and the thickness of the dielectric layer. Eventually, a matching method based on coplanar constraints was used to achieve the attitude estimation. The experimental results demonstrated that the displacement and angular accuracies were enhanced by 57% and 33.6%, respectively. The comparision of approaches adopted for vibration and the observation window in test of wind tunnel is shown in Table 3.

Principle of the attitude measurement model93.
Perspectives
Currently, the specificity and complexity of engineering applications present significant challenges, with many studies remaining at the simulation stage and lacking reliable experimental validation. Therefore, a comprehensive analysis of the current state of the art reveals several future development trends for wind tunnel attitude and deformation measurement technologies based on computer vision:
-
(1)
Adaptation to specialized application scenarios There is a need for computer vision-based measurement methods to be tailored to the unique conditions of high-speed environments, restricted visual access, and limited space inherent in wind tunnels. Additionally, the vibrations induced by wind loads on both the model and the camera, along with distortions of the observation window, impose considerable deviations on visual information processing. At the same time, the lightening of the measured object and the mitigation of reflections from the metallic surfaces present a significant challenge. Consequently, it is essential to take these specific characteristics and constraints into account when developing measurement technologies for model attitude and deformation.
-
(2)
Reliability and precision in real-time measurements The ability of computer vision-based measurements to meet accuracy requirements is pivotal for achieving contactless measurement. Utilizing high-resolution imagery can enhance measurement precision across both close-range and wide-field applications, however, this often leads to challenges in real-time performance due to increased computational demands. Therefore, lightweight vision algorithms are crucial for balancing high accuracy with real-time processing capabilities.
-
(3)
Fusion of multimodal information Relying solely on a single source of information for model attitude and deformation measurements presents limitations. The discrete nature of visual measurement methods, particularly those based on targets, can introduce errors in calculating the model’s center point and fitting the deformation between the target points. Thus, effectively leveraging the strengths of various technologies can compensate for the deficiencies in multidimensional information. At the same time, the wind tunnel test preparation process is complex, synchronization of different technologies can greatly improve the efficiency of the wind tunnel test.
-
(4)
Combining with deep learning methods There is little application of deep learning methods for measuring model attitude and deformation in wind tunnel tests. Future research on deep learning-based visual measurement systems for wind tunnels should be further developed, such as image processing94,95,96,97, monocular depth98,99,100, and pose estimation101,102,103, to achieve high-precision and real-time intelligent measurements. At the same time, transfer learning104,105,106 develops target networks for different model types with similar features in varying test environments, which can help overcome the limitations associated with the demand for large data samples, thereby enhancing measurement efficiency and performance.
-
(5)
Tending to be efficient and comprehensive It takes a long time to prepare a wind tunnel test. At present, the mainstream wind tunnel visual measurement methods are based on targets, and the time consumed by attaching targets will affect the efficiency of tests. In addition, when models are very small, it is required that the targets must be small enough, which will affect the measurement accuracy and also lead to the loss of targets. Therefore, it is necessary to research some methods that do not rely on targets to cope with various measurement situations in wind tunnel tests.
Conclusion
Computer vision-based models for attitude and deformation measurements play a crucial role in wind tunnel testing, offering advantages such as non-contact operation, automation, visualization, flexible configuration, and high accuracy in near-field measurements. Advancements in the technology are addressing the limitations of traditional sensor measurements, significantly enhancing the accuracy of aerodynamic parameter assessments for aircraft, which offers more precise and reliable data for aircraft design. Additionally, the configuration of multi-source vision measurements can be adapted for various environments, ranging from subsonic to supersonic conditions, while improving the robustness of the system. This adaptability not only shortens the preparation time for wind tunnel tests but also improves overall testing efficiency.
This paper systematically reviews the research advancements in attitude and deformation measurement methods within wind tunnels and summarizes representative methodologies and findings. This paper first provides a brief history of the wind tunnel vision measurement system, followed by a discussion of its components. Subsequently, a theoretical model of the wind tunnel vision measurement system is established, introducing the fundamental principles involved. Different methods for measuring model attitude and deformation are then categorized based on the distinct characteristics of the wind tunnel vision measurement system. These include non-real-time wind tunnel vision measurement methods, real-time wind tunnel vision measurement methods, and those based on deep learning. Then, these methods evolve from single-source information to multi-source information, forming data fusion, which included fusion with flow diagnosis techniques and CAD models. Finally, we identify the challenges faced by the vision measurement system during wind tunnel tests, specifically addressing issues related to camera and model vibrations, as well as distortion of the observation window.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Wang, X. B. et al. Numerical verification of the dynamic aerodynamic similarity criterion for wind tunnel experiments of floating offshore wind turbines. Energy 283, 129082. https://doi.org/10.1016/j.energy.2023.129082 (2023).
Mudford, N. R., O’Byrne, S., Neely, A., Buttsworth, D. & Balage, S. Hypersonic wind-tunnel free-flying experiments with onboard instrumentation. J. Spacecr. Rockets 52(1), 231–242. https://doi.org/10.2514/1.A32887 (2015).
Wang, C., Mi, P., Tian, Z. B. & Yi, G. Q. Study on temperature characteristics and correction of strain gauge balance in actual airflow environment. Aerosp. Sci. Technol. 106, 106201. https://doi.org/10.1016/j.ast.2020.106201 (2020).
Case, D. Angle-of-attack sensor analysis and calibration method for a heavy jet transport. in 15th DASC. AIAA/IEEE Digital Avionics Systems Conference, 279–283, https://doi.org/10.1109/DASC.1996.585475 (1996).
Singh, D. B. & Suryanarayana, G. K. Application of fiber bragg grating sensors for dynamic tests in wind tunnels. J. Indian Inst. Sci. 96(1), 47–52 (2016).
Watzlavick, R., Crowder, J. & Wright, F. Comparison of model attitude systems: Active target photogrammetry, precision accelerometer, and laser interferometer. in Advanced Measurement and Ground Testing Conference, 107–114, https://doi.org/10.2514/6.1996-2252 (2009).
Chen, J. G. et al. Video camera-based vibration measurement for civil infrastructure applications. J. Infrastruct. Syst. https://doi.org/10.1061/(asce)is.1943-555x.0000348 (2017).
Liu, T., Burner, A. W., Jones, T. W. & Barrows, D. A. Photogrammetric techniques for aerospace applications. Prog. Aerosp. Sci. 54, 1–58. https://doi.org/10.1016/j.paerosci.2012.03.002 (2012).
Burner, A., Fleming, G. & Hoppe, J. Comparison of three optical methods for measuring model deformation. in 38th Aerospace Sciences Meeting and Exhibit, 835, https://doi.org/10.2514/6.2000-835
Eitelberg, G. & Eckert, D. Some developments in experimental techniques of the German-Dutch wind tunnels (DNW). in 21st Aerodynamic Measurement Technology and Ground Testing Conference, 2643, https://doi.org/10.2514/6.2000-2643 (2000).
Schmidt, J., Berg, D. R., Ploeg, H.-L. & Ploeg, L. Precision, repeatability and accuracy of optotrak® optical motion tracking systems. Int. J. Exp. Comput. Biomech. 1(1), 114–127. https://doi.org/10.1504/ijecb.2009.022862 (2009).
Hébert, L. J., Moffet, H., McFadyen, B. J. & St-Vincent, G. A method of measuring three-dimensional scapular attitudes using the Optotrak probing system. Clin. Biomech. 15(1), 1–8. https://doi.org/10.1016/s0268-0033(99)00032-7 (2000).
Kushner, L. K., Drain, B. A., Schairer, E. T., Heineck, J. T. & Bell, J. H. Model deformation and optical angle of attack measurement system in the NASA unitary plan wind tunnel. In 55th AIAA Aerospace Sciences Meeting, 1052, https://doi.org/10.2514/6.2017-1052 (2017).
Liu, T. & Fleming, G. Videogrammetric determination of aircraft position and attitude for vision-based autonomous landing. in 44th AIAA Aerospace Sciences Meeting and Exhibit, 1437, https://doi.org/10.2514/6.2006-1437 (2006).
Wen, X., Shan, J., He, Y. & Song, K. C. Steel surface defect recognition: A survey. Coatings https://doi.org/10.3390/coatings13010017 (2023).
Clarke, T. Analysis of the properties of targets used in digital close-range photogrammetric measurement. in Photonics for Industrial Applications, 2350, 251–262, (SPIE, 1994).
Wiora, G., Babrou, P. & Männer, R. Real time high speed measurement of photogrammetric targets. in 26th Annual Pattern Recognition of the German-Association-for-Pattern-Recognition, vol. 3175, 562–569 (2004).
Pappa, R. S. et al. Dot-projection photogrammetry and videogrammetry of gossamer space structures. J. Spacecr. Rockets 40(6), 858–867. https://doi.org/10.2514/2.7047 (2003).
Van den Heuvel, F. Automated 3D measurement with the DCS200 digital camera. in Optical 3D Measurement Techniques II: Applications in Inspection, Quality Control, and Robotics, vol. 2252, 63–71, https://doi.org/10.1117/12.169879 (SPIE, 1994).
Pappa, R. et al. Photogrammetry methodology development for gossamer spacecraft structures. in: 43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, 1375, https://doi.org/10.2514/6.2002-1375
Heikkila, J. & Silven, O. A four-step camera calibration procedure with implicit image correction. in Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1106–1112, https://doi.org/10.1109/CVPR.1997.609468 (1997).
Kim, G. & Cha, Y. 3D Pixelwise damage mapping using a deep attention based modified Nerfacto. Autom. Constr. https://doi.org/10.1016/j.autcon.2024.105878 (2024).
Burner, A. W. & Liu, T. Videogrammetric model deformation measurement technique. J. Aircr. 38(4), 745–754. https://doi.org/10.2514/2.2826 (2001).
Liu, T., Cattafesta, L. N., Radeztsky, R. H. & Burner, A. W. Photogrammetry applied to wind-tunnel testing. AIAA J. 38(6), 964–971. https://doi.org/10.2514/2.1079 (2000).
Abdel-Aziz, Y. I., Karara, H. M. & Hauck, M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogramm. Eng. Remote Sens. 81(2), 103–107. https://doi.org/10.14358/PERS.81.2.103 (2015).
Tsai, R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J. Robot. Autom. 3(4), 323–344. https://doi.org/10.1109/JRA.1987.1087109 (1987).
Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Patt. Anal. Mach. Intell. 22(11), 1330–1334. https://doi.org/10.1109/34.888718 (2000).
Zaccara, M., Edelman, J. B. & Cardone, G. A general procedure for infrared thermography heat transfer measurements in hypersonic wind tunnels. Int. J. Heat Mass Transfer. https://doi.org/10.1016/j.ijheatmasstransfer.2020.120419 (2020).
Gluzman, I., Gray, P., Mejia, K., Corke, T. C. & Thomas, F. O. A simplified photogrammetry procedure in oil-film interferometry for accurate skin-friction measurement over arbitrary geometries. Exp. Fluids 63(7), 118. https://doi.org/10.1007/s00348-022-03466-x (2022).
Fagnani, A., Helber, B., Hubin, A. & Chazot, O. 3D infrared temperature maps measurements of ablative materials during plasma wind tunnel experiments. Meas. Sci. Technol. 34(7), 075401. https://doi.org/10.1088/1361-6501/acc67c (2023).
Machacek, M. & Rösgen, T. Fluid flow visualization by three-dimensionally reconstructed tracer path lines. J. Vis. 6(2), 115–124. https://doi.org/10.1007/bf03181616 (2003).
Owen, F., McDevitt, T., Morgan, D. & Owen, A. Wind tunnel model angle of attack measurements using an optical model attitude system. in 38th Aerospace Sciences Meeting and Exhibit, 414, https://doi.org/10.2514/6.2000-414 (2000).
Schairer, E. T., Kushner, L. K., Drain, B. A., Heineck, J. T. & Durston, D. Stereo photogrammetry measurements of the position and attitude of a nozzle-plume/shock-wave interaction model in the NASA ames 9- by 7- Ft supersonic wind tunnel. in 55th AIAA Aerospace Sciences Meeting, 1053, https://doi.org/10.2514/6.2017-1053 (2017).
Chen, J. G. et al. Modal identification of simple structures with high-speed video using motion magnification. J. Sound Vib. 345, 58–71. https://doi.org/10.1016/j.jsv.2015.01.024 (2015).
Ruyten, W. Model attitude determination in wind tunnel with a luminescent paint data system. AIAA J. 38(9), 1692–1697. https://doi.org/10.2514/2.1155 (2000).
Chen, Y.-f., Wu, L.-n., Yue, S.-l. & Lin, Q. Pose measurement base on machine vision for the aircraft model in wire-driven parallel suspension system. In Fifth International Conference on Machine Vision (ICMV 12), vol. 8783, 333–338, (SPIE, 2013).
Spain, C. et al. Assessing videogrammetry for static aeroelastic testing of a wind-tunnel model. in 45th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference, 1677, https://doi.org/10.2514/6.2004-1677 (2004).
Leifer, J., Weems, B. J., Kienle, S. C. & Sims, A. M. Three-dimensional acceleration measurement using videogrammetry tracking data. Exp. Mech. 51(2), 199–217. https://doi.org/10.1007/s11340-010-9352-4 (2011).
Jones, T. & Lunsford, C. Design and Development of a Real-time model attitude measurement system for hypersonic facilities. In 43rd AIAA Aerospace Sciences Meeting and Exhibit, 1411, https://doi.org/10.2514/6.2005-1411 (2005).
Liu, S., Feng, Y., Shen, K., Wang, Y. & Chen, S. An RGB-D-based cross-field of view pose estimation system for a free flight target in a wind tunnel. Complexity 1, 7358491. https://doi.org/10.1155/2018/7358491(2018) (2018).
Jia, Z. et al. Pose measurement method and experiments for high-speed rolling targets in a wind tunnel. Sensors 14(12), 23933–23953. https://doi.org/10.3390/s141223933 (2014).
Liu, W. et al. Position and attitude measurement of high-speed isolates for hypersonic facilities. Measurement 62, 63–73. https://doi.org/10.1016/j.measurement.2014.10.058 (2015).
Fan, L., Nie, B. & Jiang, Y. Wind tunnel free flight model attitude determination based on non-contact IR optical measurement. In Asia-Pacific International Symposium on Aerospace Technology, 257–268, (Springer, 2023).
Zhang, M., Liang, J., Chen, L., Tang, Z. & Zong, Y. A stereo photogrammetry system for model position and attitude measurement in hypersonic wind tunnel testing. Rev. Sci. Instrum. 92(7), 075107. https://doi.org/10.1063/5.0059161 (2021).
Huang, M. F., Zhang, B. Y., Lou, W. J. & Kareem, A. A deep learning augmented vision-based method for measuring dynamic displacements of structures in harsh environments. J. Wind Eng. Ind. Aerodyn. 217, 104758. https://doi.org/10.1016/j.jweia.2021.104758 (2021).
Barrows, D. Videogrammetric model deformation measurement technique for wind tunnel applications. in 45th AIAA Aerospace Sciences Meeting and Exhibit, 1163, https://doi.org/10.2514/6.2007-1163 (2007).
Burner, A. et al. Wing deformation measurements of the DLR-F6 transport configuration in the national transonic facility (Invited). in 26th AIAA Applied Aerodynamics Conference, 6921, https://doi.org/10.2514/6.2008-6921
Burner, A. & Martinson, S. Automated wing twist and bending measurements under aerodynamic load. In Advanced Measurement and Ground Testing Conference, 2253, https://doi.org/10.2514/6.1996-2253
Graves, S. & Burner, A. Development of an intelligent videogrammetric wind tunnel measurement system. In International Symposium on Optical Science and Technology, vol. 4448, 120–131, (SPIE, 2001).
Mantik, J. Enhancement of the stereo pattern tracking technique for model deformation assessment at ETW. in 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, 870, https://doi.org/10.2514/6.2013-870 (2013).
Mignosi, A., Touron, G., Sant, Y. l. & Bourguignon, G. Model Deformation measurement in the ONERA F1 wind tunnel. in 2007 22nd International Congress on Instrumentation in Aerospace Simulation Facilities, 1–8, https://doi.org/10.1109/ICIASF.2007.4380877 (2007).
Kompenhans, J. et al. Recent developments of image based measurement methods for application to transonic flows in industrial wind tunnels. Chin. J. Aeronaut. 19(2), 114–125. https://doi.org/10.1016/S1000-9361(11)60291-4 (2006).
Zhang, L., Yang, J. J. & Zhang, J. Investigation of OpenCV image processing technique applied in wind tunnel ice-shape measurement. in 2nd International Conference on Advanced Design and Manufacturing Engineering (ADME 2012), vol. 220–223, 1350-+, https://doi.org/10.4028/www.scientific.net/AMM.220-223.1350 (2012).
Guo, Q. F. & Wang, J. J. High-accuracy 3-D deformation measurement method with an improved structured-light principle. Sci. China-Technol. Sci. 66(12), 3450–3461. https://doi.org/10.1007/s11431-023-2516-3 (2023).
Yu, Y. A., Yang, Q. P. & Wang, X. J. 3D imaging application in the studies of micro air vehicles. Comput. Ind. 64(9), 1178–1185. https://doi.org/10.1016/j.compind.2013.06.009 (2013).
Liu, J. B., Guo, P. Y. & Sun, X. L. An automatic 3D point cloud registration method based on biological vision. Appl. Sci. Basel 11(10), 4538 (2021).
Bryant, R. A., Donbar, J. M. & Driscoll, J. F. Acetone laser induced fluorescence for low pressure/low temperature flow visualization. Exp. Fluids 28(5), 471–476. https://doi.org/10.1007/s003480050407 (2000).
Tian, Q., Lowe, K. T. & Simpson, R. L. A three-velocity-component laser-Doppler velocimeter for measurements inside the linear compressor cascade. Exp. Fluids 43(4), 487–499. https://doi.org/10.1007/s00348-007-0311-5 (2007).
Yao, R., Hao, H. & Qiao, Q. PIV measurements and data accuracy analysis of flow in complex terrain. in Optics and Optoelectronic Inspection and Control: Techniques, Applications, and Instruments, vol. 4221, 175–179, (SPIE, 2000).
Asai, K., Amao, Y., Iijima, Y., Okura, I. & Nishide, H. Novel pressure-sensitive paint for cryogenic and unsteady wind-tunnel testing. J. Thermophys. Heat Transf. 16(1), 109–115. https://doi.org/10.2514/2.6658 (2002).
Fey, U. et al. Transition detection by temperature sensitive paint at cryogenic temperatures in the European Transonic Wind tunnel (ETW). in 20th international congress on instrumentation in aerospace simulation facilities, 2003. ICIASF '03., 77–88, https://doi.org/10.1109/ICIASF.2003.1274855 (2003).
Bell, J. & Burner, A. Data fusion in wind tunnel testing - Combined pressure paint and model deformation measurements. in 20th AIAA Advanced Measurement and Ground Testing Technology Conference, 2500, https://doi.org/10.2514/6.1998-2500
Le Sant, Y. & Ieee. A model deformation method applied to PSP measurements. in 20th International Congress on Instrumentation in Aerospace Simulation Facilities, 95–104 (2003).
Burner, A. W., Liu, T., Garg, S., Bell, J. H. & Morgan, D. G. Unified model deformation and flow transition measurements. J. Aircr. 36(5), 898–901. https://doi.org/10.2514/2.2528 (1999).
Bell, J. H. & McLachlan, B. G. Image registration for pressure-sensitive paint applications. Exp. Fluids 22(1), 78–86. https://doi.org/10.1007/BF01893308 (1996).
McLachlan, B. G. & Bell, J. H. Pressure-sensitive paint in aerodynamic testing. Exp. Therm. Fluid Sci. 10(4), 470–485. https://doi.org/10.1016/0894-1777(94)00123-P (1995).
Quinn, M. K. & Fisher, T. B. Simultaneous measurement of surface shape and pressure using structured illumination. Meas. Sci. Technol. 32(2), 024011. https://doi.org/10.1088/1361-6501/abb436 (2021).
Mendoza, D. R. Limiting mach number for quantitative pressure-sensitive paint measurements. AIAA J. 35(7), 1240–1241. https://doi.org/10.2514/2.228 (1997).
Nietiedt, S. et al. A wind tunnel setup for fluid-structure interaction measurements using optical methods. Sensors 22(13), 5014. https://doi.org/10.3390/s22135014 (2022).
Cheng, L., Yang, Y. N., Xue, B. D., Zhou, F. G. & Bai, X. Z. Attitude measurement by using target schlieren graph and 3D digital model in wind tunnel. in 6th International Conference on Graphic and Image Processing (ICGIP), vol. 9443, 468–473, https://doi.org/10.1117/12.2179206 (SPIE, 2014)
Dong, Z. et al. Pressure-sensitive paint integrated with digital image correlation for instantaneous measurement on rotating blades. Aerosp. Sci. Technol. 126, 107667. https://doi.org/10.1016/j.ast.2022.107667 (2022).
Kasula, P., Whidborne, J. F. & Rana, Z. A. Quaternion-based attitude estimation of an aircraft model using computer vision. Sensors 24(12), 3795. https://doi.org/10.3390/s24123795 (2024).
Burner, A., Liu, T. & DeLoach, R. Uncertainty of Videogrammetric Techniques used for Aerodynamic Testing. in 22nd AIAA Aerodynamic Measurement Technology and Ground Testing Conference, 2794, https://doi.org/10.2514/6.2002-2794 (2002).
Zhang, Z. Y., Sun, Z. X., Huang, X. H. & Sun, Y. Videogrammetry of the model’s attitude in wind tunnel testing. in 3rd International Conference on Digital Manufacturing and Automation (ICDMA 2012), vol. 190–191, 1273–1277, https://doi.org/10.4028/www.scientific.net/AMM.190-191.1273 (2012).
Liu, T., Barrows, D. A., Burner, A. W. & Rhew, R. D. Determining aerodynamic loads based on optical deformation measurements. AIAA J. 40(6), 1105–1112. https://doi.org/10.2514/2.1759 (2002).
Abdel Aziz, S. S., Moustafa, E. B. & Salem Said, A.-H.S. Experimental investigation of the flow, noise, and vibration effect on the construction and design of low-speed wind tunnel structure. Machines 11(3), 360. https://doi.org/10.3390/machines11030360 (2023).
Faugeras, O. D., Luong, Q. T. & Maybank, S. J. Camera self-calibration: Theory and experiments. In Computer Vision: ECCV’92, 321–334, (Springer, 1992).
Xiao, Z., Liang, J., Yu, D., Tang, Z. & Asundi, A. An accurate stereo vision system using cross-shaped target self-calibration method based on photogrammetry. Opt. Lasers Eng. 48(12), 1252–1261. https://doi.org/10.1016/j.optlaseng.2010.06.006 (2010).
Strobl, K. H. & Hirzinger, G. More accurate pinhole camera calibration with imperfect planar target. In 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), 1068–1075, https://doi.org/10.1109/ICCVW.2011.6130369 (2011).
Maybank, S. J. & Faugeras, O. D. A theory of self-calibration of a moving camera. Int. J. Comput. Vis. 8(2), 123–151. https://doi.org/10.1007/BF00127171 (1992).
Chen, R., Liu, M., Zhong, K., Li, Z. & Shi, Y. A Self-Recalibrated 3D Vision System for Accurate 3D Tracking in Hypersonic Wind Tunnel. in SEM Annual Conference and Exposition on Experimental and Applied Mechanics, 261–269, https://doi.org/10.1007/978-3-319-41600-7_34 (2016).
Schairer, E. T. & Hand, L. A. Measurements of unsteady aeroelastic model deformation by stereo photogrammetry. J. Aircr. 36(6), 1033–1040. https://doi.org/10.2514/2.2545 (1999).
Black, J. T., Pitcher, N. A., Reeder, M. F. & Maple, R. C. Videogrammetry dynamics measurements of a lightweight flexible wing in a wind tunnel. J. Aircr. 47(1), 172–180. https://doi.org/10.2514/1.44545 (2010).
Sun, X., Wu, H. & Wu, Y. Vibration monitoring of an open-type one-way tensioned membrane structure based on stereovision. Rev. Sci. Instrum. 90(7), 075112. https://doi.org/10.1063/1.5094916 (2019).
Zhu, Y., Gu, Y. & Zhai, C. Binocular videogrammetric system for three-dimensional measurement in low-speed wind tunnel. In Optical Metrology and Inspection for Industrial Applications III, vol. 9276, 280–289, (SPIE, 2014).
Chang, C. C. & Ji, Y. F. Flexible videogrammetric technique for three-dimensional structural vibration measurement. J. Eng. Mech. 133(6), 656–664. https://doi.org/10.1061/(ASCE)0733-9399(2007)133:6(656) (2007).
Huang, M. F., Zhang, B. Y. & Lou, W. J. A computer vision-based vibration measurement method for wind tunnel tests of high-rise buildings. J. Wind Eng. Ind. Aerodyn. 182, 222–234. https://doi.org/10.1016/j.jweia.2018.09.022 (2018).
Le Xuan, L., Siringoringo, D. M., Katsuchi, H., Fujino, Y. & Xuan Luong, B. Stereovision-based vibration measurement of stay cable using synchronized multi-camera setup and video motion magnification. Eng. Struct. 296, 116938. https://doi.org/10.1016/j.engstruct.2023.116938 (2023).
Ou, Y. et al. Design and simulation of a conformal optical window pair by the quasi-quantitative Schlieren measurement in a cylindrical isolator. Opt. Eng. 62(3), 035107. https://doi.org/10.1117/1.OE.62.3.035107 (2023).
Gramola, M., Bruce, P. J. K. & Santer, M. Photogrammetry for accurate model deformation measurement in a supersonic wind tunnel. Exp. Fluids 60(1), 8. https://doi.org/10.1007/s00348-018-2652-7 (2018).
Ma, X. et al. A photogrammetry pose measurement method for moving targets in a wind tunnel. in 2016 IEEE International Instrumentation and Measurement Technology Conference Proceedings, 1–5, https://doi.org/10.1109/I2MTC.2016.7520419 (2016).
Agrawal, A., Ramalingam, S., Taguchi, Y. & Chari, V. A theory of multi-layer flat refractive geometry. in 2012 IEEE Conference on Computer Vision and Pattern Recognition, 3346–3353, https://doi.org/10.1109/CVPR.2012.6248073 (2012).
Liu, W. et al. A novel vision-based pose measurement method considering the refraction of light. Sensors 18(12), 4348. https://doi.org/10.3390/s18124348 (2018).
Krizhevsky, A., Sutskever, I. & Hinton, G. E. ImageNet classification with deep convolutional neural networks. Commun. ACM 60(6), 84–90. https://doi.org/10.1145/3065386 (2017).
Chen, L. C., Papandreou, G., Kokkinos, I., Murphy, K. & Yuille, A. L. DeepLab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs. IEEE Trans. Patt. Anal. Mach. Intell. 40(4), 834–848. https://doi.org/10.1109/tpami.2017.2699184 (2018).
Zhang, S., Zhao, W., Guan, Z., Peng, X. & Peng, J. Keypoint-graph-driven learning framework for object pose estimation. In 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 1065–1073, https://doi.org/10.1109/CVPR46437.2021.00112 (2021).
Zhang, K., Zuo, W. M., Chen, Y. J., Meng, D. Y. & Zhang, L. Beyond a Gaussian denoiser: residual Learning of deep CNN for image denoising. IEEE Trans. Image Process. 26(7), 3142–3155. https://doi.org/10.1109/tip.2017.2662206 (2017).
Saxena, A., Chung, S. H. & Ng, A. Y. 3-d depth reconstruction from a single still image. Int. J. Comput. Vis. 76(1), 53–69. https://doi.org/10.1007/s11263-007-0071-y (2008).
Zhou, T. H., Brown, M., Snavely, N., Lowe, D. G. & Ieee. Unsupervised Learning of Depth and Ego-Motion from Video. in 30th IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 6612-+, https://doi.org/10.1109/cvpr.2017.700 (2017).
Sun, L. B. et al. SC-DepthV3: Robust self-supervised monocular depth estimation for dynamic scenes. IEEE Trans. Patt. Anal. Mach. Intell. 46(1), 497–508. https://doi.org/10.1109/tpami.2023.3322549 (2024).
Li, Y., Wang, G., Ji, X. Y., Xiang, Y. & Fox, D. DeepIM: Deep iterative matching for 6D pose estimation. Int. J. Comput. Vis. 128(3), 657–678. https://doi.org/10.1007/s11263-019-01250-9 (2020).
Hoang, D. C., Stork, J. A. & Stoyanov, T. Voting and attention-based pose relation learning for object pose estimation from 3D point clouds. IEEE Rob. Autom. Lett. 7(4), 8980–8987. https://doi.org/10.1109/lra.2022.3189158 (2022).
Chen, Y., Li, Z., Li, Q. & Zhang, M. Pose estimation algorithm based on point pair features using PointNet + + Complex Intell. Syst. 10(5), 6581–6595. https://doi.org/10.1007/s40747-024-01508-x (2024).
Yang, Z. et al. Deep transfer learning for military object recognition under small training set condition. Neural Comput. Appl. 31(10), 6469–6478. https://doi.org/10.1007/s00521-018-3468-3 (2019).
Wang, Y., Lu, X. R. & Chen, Y. Premonition-driven deep learning model for short-term ship violent roll motion prediction based on the hull attitude premonition mechanism. Appl. Ocean Res. 146, 103970. https://doi.org/10.1016/j.apor.2024.103970 (2024).
Narmadha, C. et al. Robust deep transfer learning based object detection and tracking approach. Intell. Autom. Soft Comput. 35(3), 3613–3626. https://doi.org/10.32604/iasc.2023.029323 (2023).
Author information
Authors and Affiliations
Contributions
Xiang Xiangyi designed the structure of article and wrote the manuscript text. Xiang Xiangyi , Wang Shuai and Cheng Xu conducted the summary of references. Zhang Jiang and Meng Fanwu are responsible for language editing and reviewing. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Xiangyi, X., Shuai, W., Xu, C. et al. Current status and prospects of computer vision-based attitude and deformation measurement applications in wind tunnels. Sci Rep 15, 11890 (2025). https://doi.org/10.1038/s41598-025-96000-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-96000-y
